您当前的位置:检测资讯 > 检测案例
嘉峪检测网 2018-11-23 14:24
砂轮表面形貌特征主要有磨粒的个数、磨粒的几何形状及分布、磨粒的切削刃及切削刃的出刃高度等。它们是磨削过程的重要输入参数,直接影响磨削性能的好坏。砂轮表面形貌特征是砂轮表面形貌建模、磨削建模与仿真、砂轮表面形貌评价与分析和磨削过程优化时不可或缺的先决条件。不同的检测方法对砂轮表面形貌的检测要素和检测精度各异,因此检测方法的正确选择对砂轮表面形貌的研究至关重要。
由于砂轮表面磨粒形状复杂多变,磨削加工的条件和要求也各不相同。迄今为止,对于砂轮表面形貌的研究还没有统一的检测方法。但砂轮表面形貌检测方法已逐渐摆脱了检测精度低、人眼主观测定处理数据的状况,出现了一些新的方法。
我们将典型的砂轮表面形貌检测方法进行分类,概述各检测方法的基本原理,并按照其工作状态、有无人为影响、检测精度以及检测形貌特征参数等方面进行总结和对比,突显出各检测方法的优势与不足,指出了砂轮表面形貌检测方法存在的问题,最后展望了其发展前景。
1 砂轮表面形貌检测方法分类
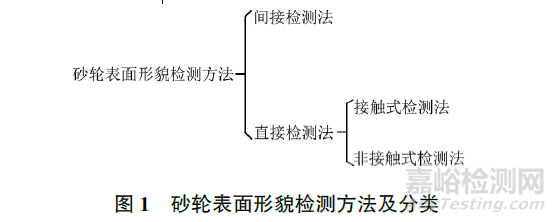
砂轮表面形貌检测方法种类繁多,其分类如图1所示。根据检测信号的性质不同,可分为间接检测法和直接检测法。
间接检测法通常借助其他信号的传感器来完成检测,如检测力、声、振动等信号参数来判断砂轮表面形貌;而直接检测法通常借助物理探针或光学仪器直接分析砂轮表面形貌。直接检测法又可分为接触式和非接触式两种。
2 间接检测法
间接检测法主要针对磨削加工过程,通过检测加工过程中力、热、振动、声波等信号,基于经验与数据,判断砂轮表面的整体情况。其可以分为以下几种。
(1)测温测力法
砂轮的锐钝状态可以由其磨削力和磨削温度反映出来。因此,可以使用测力仪测量磨削力、热电偶测量磨削温度进而判断砂轮锐钝状态。当砂轮磨削时,磨粒切削刃与工件的相互作用将产生磨削力和磨削温度。通过示波器观察及高速摄像机摄影可以确定动态有效切削刃数。
该检测方法可以进行在线检测,对砂轮没有破坏性,但只能检测出动态有效切削刃数,不能提供完整的砂轮表面形貌信息。
(2)液压法
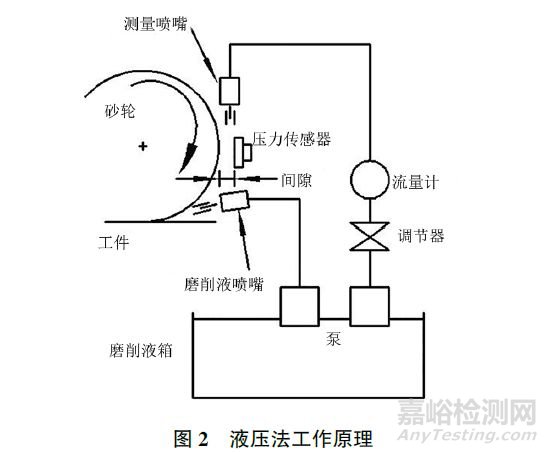
Furutani等采用液压法来检测砂轮表面形貌特征,其基本原理如图2所示。压力传感器与砂轮外表面有微小间隔。在工作时,转动的砂轮把从测量喷嘴中喷出来的磨削液拖拽到该微小间隔中,从而在间隔处产生压力。压力传感器接收到压力信息之后,把压力信号转化为电信号,并传递到计算机中进行存储、处理分析,再通过压力与间隙的关系得到该间隙的大小与其变化值,该变化值反映了砂轮表面形貌的变化,即砂轮在工作过程中的磨损量。
液压法检测简单方便,能有效检测出砂轮的磨损与钝化,因此便于及时修整砂轮。但是此法不能给出磨粒密度、大小、间距等主要参数的变化,不能提供完整的砂轮表面形貌信息。而且在检测过程中,砂轮回转产生的径向跳动误差会叠加在检测结果之中。另外,测量喷嘴是由液压泵通过调节阀直接连接,泵的压力波动会影响测量结果。
母德强等对液压法进行了改进,采用液体差压技术和误差分离技术建立了砂轮状态与压力之间的关系,利用CFX软件绘制压力与距离的工作曲线图,检测了砂轮表面的磨损量和钝化程度。差压技术有效地消除了由于供压源的压力波动而产生测量误差,提高了检测精度,弥补了传统液压方法的不足。
(3)声发射检测法
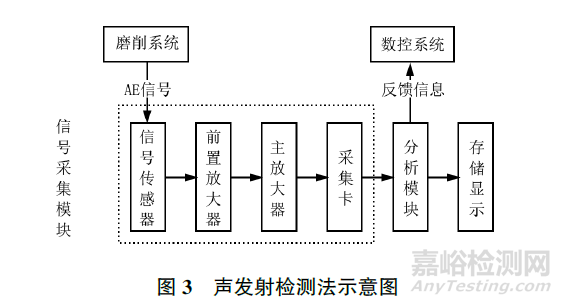
该检测方法的原理如图3所示:砂轮磨削工件时,磨粒去除工件表面材料的过程中发出的声音信号被砂轮罩侧面的声发射传感器接收,并将其转换为电信号,然后交给前置放大器和主放大器进行放大和滤波处理,再经一定的算法转换为数字信号,最后由系统分析处理模块处理后得到AE特征信息。AE特征信息的幅值反映砂轮表面的磨损。
声发射检测法可以在线检测出砂轮的锐钝情况,便于及时修整砂轮,但不能提供磨粒数目、出刃、分布等砂轮表面形貌特征参数。
3 直接检测法
与间接检测法相比,直接检测法一般多为离线检测,无法反映实际磨削过程;但其可以在更细尺度上反映砂轮表面形貌。根据检测时是否接触砂轮,直接检测法又可以分为接触式检测法和非接触式检测法两种。
3.1接触式检测法
接触式检测法主要通过机械接触的方式检测砂轮表面形貌,受检测手段限制,一般只适用于粗粒度砂轮表面形貌的检测。
(1)触针轮廓仪法
触针轮廓仪法在合适的采样间距下,通过触针与砂轮表面直接接触,沿砂轮表面逐点扫描来获取砂轮表面形貌特征。触针扫描时,位移传感器把它接收的垂直移动信号转换成电信号,再通过放大和处理后由转换器转换成数字信号。得到的垂直移动信息和触针的采样间距就是砂轮表面采样点的三维坐标信息,进而对砂轮表面形貌进行重建。
该检测方法可获得砂轮表面的大致轮廓,分析出磨粒的形状、分布和出刃高度,具有直观、容易理解等特性,但检测精度不高;扫描速度慢的缺点也限制了此方法的工业化应用。另外,测量过程中触针易磨损,使砂轮表面形貌检测信息失真,因此该检测方法很难测量细微的形貌特征,只可用于较粗粒度砂轮表面形貌的检测。
(2)划痕复印法
划痕复印法是在外圆磨床上进行的。在复印前需对工件进行研磨,使工件表面光亮、平整。复印时,砂轮与工件的转速比成整倍数,如转速比为2时,砂轮转动1周与工件的1/2周相接触,最终工件上可以得到两条相似的划痕。划痕可以反映砂轮的形貌状态,但只能粗略分析砂轮有效切削刃密度。
划痕复印法操作方便,检测速度快,但检测精度低,不能检测磨粒形状和大小,只能检测粗粒度砂轮表面的形貌。而且划痕复印所使用的工件必须是光整的研磨件,每次检测的成本很高。
(3)印迹法
其原理是在弹性支承辊与砂轮之间放置玻璃板和复写纸,砂轮缓慢转动的同时同步移动复写纸和玻璃板,即可在玻璃板上复印出磨粒的二维分布点图。对其进行分析计算就可得到磨粒分布密度。
该检测方法简单方便,但检测精度低,只能粗略检测出最大出刃高度磨粒的分布情况,无法提供完整的砂轮表面形貌信息,且只适合检测粗粒度砂轮。
3.2 非接触式检测法
非接触式检测法主要通过两种方式来获取砂轮表面形貌:一种是显微镜式检测法,通过显微镜成像、测量或扫描来获取砂轮表面形貌信息;另一种是光学式检测法,将光学测量技术与信息处理技术相结合,根据光学散射或干涉原理进行检测。
3.2.1 显微镜式检测法
(1)显微镜准焦法
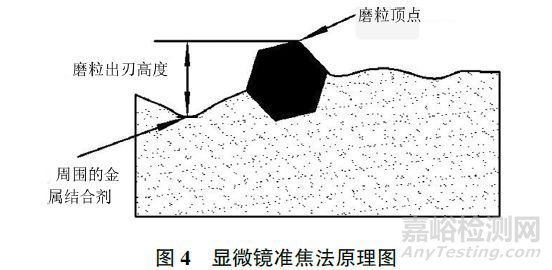
该检测方法的基本原理如图4所示,利用反光显微镜分别对砂轮表面磨粒的顶点和周围的金属结合剂的最低点进行聚焦,同时记录调焦旋钮刻度的变化值,该变化值与调焦旋钮每格所代表尺寸的乘积则为磨粒的出刃高度。调焦旋钮每格代表的尺寸越小,显微镜准焦法的检测精度就越高。
显微镜准焦法设备投资小,操作简单,能直接检测出磨粒的出刃高度;且磨粒的形状可由反光显微镜对磨粒的多次聚焦得到。但磨粒分布密度的计算比较烦琐,而且聚焦情况的判别过于主观,检测精度低。
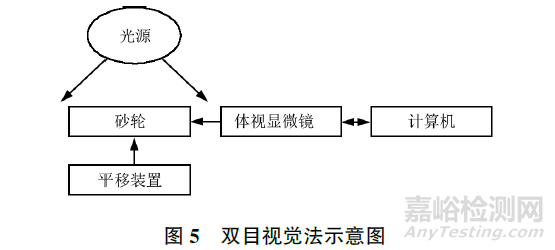
(2)双目视觉法
双目视觉法是通过模仿人类视觉系统,利用体式显微镜对砂轮表面进行双目立体图像的采集。通过对图像的分析和处理,准确获取砂轮表面各点的深度信息,再通过建模处理重构出砂轮表面形貌,其示意图如图5所示。在构建实际的双目视觉检测系统,采集双目立体图像时,用一台固定的CCD摄像机,通过平移装置移动砂轮来实现。
该方法实现了砂轮表面磨粒高度、磨粒间距和磨粒磨损量等特征信息的检测。这种直接检测方法具有检测精度较高、检测结果直观、计算效率高、适应性较强、操作较简单等优点。
(3)扫描电子显微镜法
该方法是利用聚焦电子束对砂轮表面各点进行扫描而得到砂轮表面的立体图像。其原理是在砂轮上截取小块试样,采用真空蒸镀法在其表面镀上一层金属,然后将试样放于扫描电子显微镜中进行检测。砂轮表面反射出二次电子信号,并由探测器接收后转换成电信号;砂轮形貌的高低不同导致二次电子发射量改变,从而导致电信号的大小也随之改变。调节显像管亮度,可获得砂轮表面形貌的立体图像,而后采用等高线法绘制出其立体形貌轮廓图,分析出磨粒间距及其出刃高度。
该检测方法直观,但扫描电子显微镜价格较高,视野较小,检测过程比较烦琐,难以检测磨粒密度等特征参数,且是一种破坏性检测方法。
3.2.2 光学式检测法
根据所使用的检测原理不同,将光学式检测法分为光学散射原理检测技术和光学干涉原理检测技术。下列方法中,前6种方法依据光学散射原理;余下2种方法依据光学干涉原理。
(1) 光电检测法
光电检测法的原理是利用光束投射到砂轮表面,砂轮磨粒切削刃的各个棱面对光线进行反射,反射光经过矩形光栅射入光电倍增管,从而得到相应的光电波形,然后加以放大、限幅与整形得到待测的方波,计算机接收方波信号并对其进行分析与处理。方波的间隔和宽度分别与磨粒间距和磨粒磨损面长度相对应,从而可以求得平均磨粒间距和平均磨粒磨损面长度等参数。比较磨削过程不同阶段检测的矩形波,可以获得磨粒的变动情况(如:磨损、钝化、破碎、脱落),可对砂轮表面实现实时监测。
该方法可检测磨粒间距、密度和磨损程度,但无法检测出磨粒的出刃高度。
(2)光截法
光截法又称光切法。其检测装置主要由光学分度头、投射镜、显微镜等构成。光截法的原理是转动分度手柄,读取磨粒在砂轮圆周上的空间位置,然后采用投射镜中的光源,经透镜及光栅以矩形光束照射于砂轮表面,形成矩形测定带,测定带的长轴与砂轮轴线平行。显微镜镜头与砂轮圆周方向相切,通过显微镜中的刻度目镜可以测量磨粒切削刃的长度和轴向位置。
此法能检测出磨粒出刃高度,但对磨粒分布密度进行检测时操作很烦琐。由于光线照射在透明物上,大部分发生透射和折射,导致反射效果不明显,成像模糊,加之测量视域为一狭缝,视场较暗,难以辨认被测点,甚至有时把砂轮表面的划痕或磨粒脱落的凹坑也误判为出刃高度,因此检测透明度高的金刚石磨粒效果并不理想。
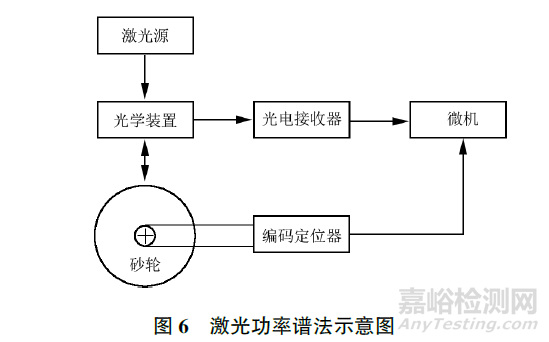
(3)激光功率谱法
激光功率谱法的检测装置示意图如图6所示。激光束从激光源发出,经光学装置投射到砂轮表面,光束经过砂轮面反射,再通过光学装置后在衍射场上形成功率谱图像,经光电接收器后传入微机中进行采样,砂轮表面上的采样位置由编码定位器的信号确定。计算机采样的同时控制光电接收器,使其在线检测时完成一系列完整的采样动作。计算机对采样数据进行处理后得到砂轮磨粒间距和磨损情况等特征信息。
该方法能够实现在线检测,检测精度较触针法高;但它不能获取砂轮表面的高度信息。
(4)激光三角法
激光三角法的扫描装置由激光器LA、透镜组L1、L2和位置敏感器件PSD1、PSD2组成,其原理如图7所示。砂轮对投射到表面的激光进行漫反射,反射光穿过L1、L2后汇聚到两边的PSD上。砂轮表面反射光斑的位置随扫描装置沿X轴方向移动,在Z轴方向不断改变,导致光斑在PSD器件上所成的像的位置也发生相应改变,位置信号进行模数转换后输入计算机,并根据三角关系求得砂轮表面检测点处Z方向的深度值。
通过测量砂轮表面各点可得到其磨粒密度、间距和出刃高度。该检测方法检测精度较高,但不适用于细粒度砂轮的表面形貌检测,另外激光探头较贵,不宜进行工业化的使用。
杜晗等采用具有激光三角法原理的电荷耦合器件和激光位移传感器对金刚石砂轮进行轮廓检测,它可以将砂轮表面轮廓的高度值转化为对应的模拟电压输出,实现高精度检测。
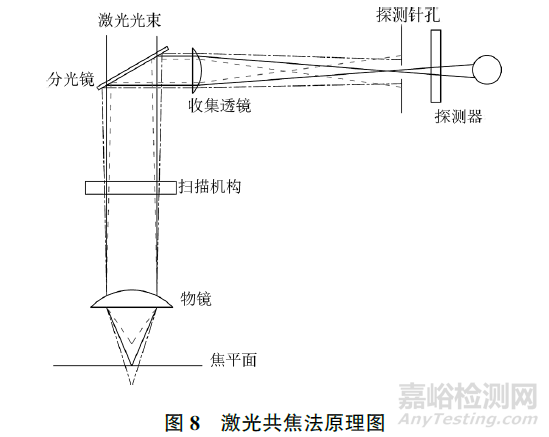
(5)激光共焦法
该方法利用激光共焦扫描显微镜扫描砂轮表面,实现其表面形貌特征的检测。其成像原理如图8所示。采取共轭焦点技术使砂轮表面、激光光源及探测器处于相互对应的共轭位置,由激光器输出的激光束经物镜后聚焦于砂轮表面,对砂轮表面进行逐点扫描。光束被砂轮表面反射经物镜后被分光镜反射到探测光路,经收集透镜汇聚,并通过探测针孔被探测器接收,之后传送到计算机进行存储;对砂轮某一位置进行轴向多次二维截面图像扫描,重构出砂轮表面的三维形貌图。其中,探测针孔过滤了焦平面外的杂散光,具有滤波的作用。
激光共焦法可用于检测砂轮表面磨粒的出刃高度、分布密度、大小,具有非接触、对表面没有破坏性、检测精度高、对比度高、成像清晰等优点,能够对砂轮不同深度进行逐层扫描,获得砂轮大量断层图像,但其扫描速度较慢。
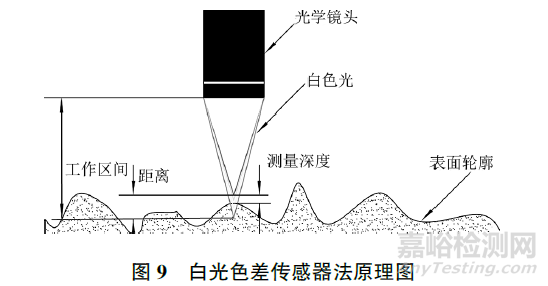
(6)白光色差传感器法
该方法采用包含白光色差传感器的三维轮廓扫描系统来检测砂轮表面形貌,其原理如图9所示。白色光通过具有高度色差的透镜,按照波长把光分为7种色光,7种色光通过透镜后在与透镜不同距离处聚焦。聚焦在砂轮表面上不同波长的光将被反射透过透镜,而没有聚焦在砂轮表面的光将被发散出去,通过返回到传感器的光的波长和波长的焦距来推断出透镜到砂轮的距离,从而检测出磨粒切削刃的密度、大小、间距和出刃高度。
该检测方法对砂轮无破坏性且检测速度快,但检测精度不高。
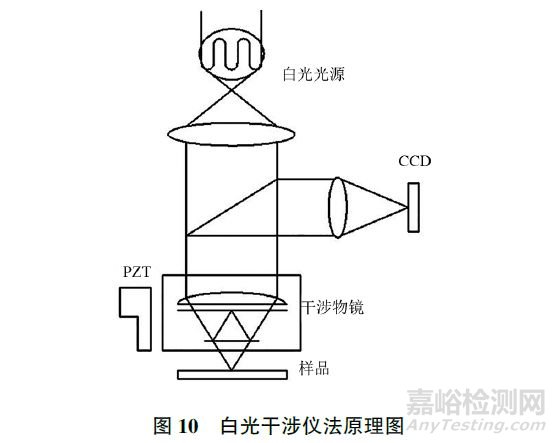
(7)白光干涉仪法
该检测方法的原理如图10所示,光源发出的白光光束通过分光棱镜后被分成两束,两束光线分别投射到参考平面和砂轮表面后均被反射,反射光线相交后发生干涉,并形成干涉条纹。两束光的光程差决定干涉条纹的亮度,根据白光干涉条纹明暗度就可以分析出被测表面的相对高度。扫描头沿磨粒高度方向对砂轮表面扫描的同时,CCD摄像对产生的干涉图像进行采集,经过频域分析就可获得相应的高度值,之后对测量所得的原始数据进行滤波处理,从而获得三维表面形貌特征。
该检测方法不损伤被测物体表面,可以检测砂轮表面磨粒的出刃高度、密度和间距等参数,扫描速度快,检测精度高,相位不模糊,取样面积和检测精度都能满足细粒度金刚石砂轮表面形貌检测的要求。此外白光干涉稳定性较高,光源输出功率的变化和外界干扰对测量结果没有影响。但数据和图像处理过程复杂,且不能进行在线测量。目前干涉式轮廓仪的价格较贵,不宜进行工业化推广。
崔长彩等对白光干涉扫描系统进行了改进,驱动机构中增加了用于对焦的步进电动机,运用自动扫描控制程序实现了对焦功能和扫描范围的确定,实现了自动对焦和垂直扫描范围的确定,提高了测量效率、检测精度和白光干涉仪法的自动化水平。
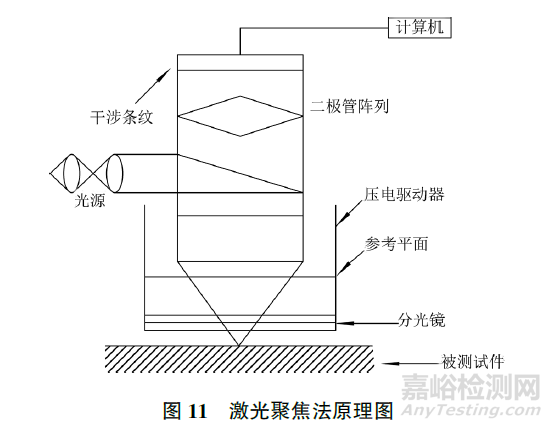
(8)激光聚焦法
激光聚焦法又叫激光干涉法。目前最典型的就是激光探针干涉法,其原理如图11所示。利用很细的聚焦光探针投射砂轮表面,砂轮表面附近放置参考镜,参考光和测量光采用相同的路径,其中参考光可以通过压电驱动器在轴向位置轻微地移动,对干涉条纹进行观察并储存,表面上高度的变化引起参考光和测量光光程差的变化,从而导致光电探测器上的信号发生改变;对干涉条纹图像进行相位分析可得出砂轮表面上采样点的实际高度,从而得到砂轮的表面廓形。
此法可以检测砂轮表面磨粒的出刃高度、间距和密度。该技术灵敏度高,但易受振动的影响。
4 总结与展望
砂轮表面形貌检测的研究已经有五十多年,其检测方法种类繁多,由最初的低精度、人眼主观测量到现在的高精度、借助电子计算机用程序操作及处理数据,可见砂轮表面形貌检测技术越来越先进。
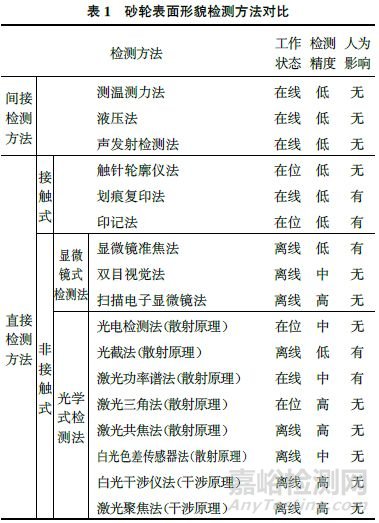
上述砂轮表面形貌检测方法各有不同的特点,表1对现有砂轮表面形貌检测方法按工作状态、检测精度、有无人为因素影响进行比较。由上述砂轮表面形貌检测方法及表1可知,砂轮表面形貌检测方法存在以下特点和问题:
(1)间接检测方法种类较少,一般能实现在线测量。主要借助传感器检测砂轮表面磨粒的磨损状况或切削刃数目,但会引进众多环境误差,不能提供磨粒出刃高度、磨粒密度等主要参数和完整的砂轮信息。
(2)直接接触式检测方法以触针轮廓仪法最为常见,它可以获得砂轮表面的磨粒形状和分布,具有简单直观等特点,但检测速度慢、精度低,容易磨损,只可用于较粗粒度的砂轮。
(3)近年来,国内外对直接非接触式检测技术的研究较多,其优点主要有:精度高、测量范围大、检测时间较短、不影响测量对象和现场等。
直接非接触式检测技术中,扫描电子显微镜法能检测较小样本,但检测成本较高,视野较小,检测过程比较烦琐。用光学仪器测量砂轮表面形貌比较困难。在测量陡峭斜面、锋利的边缘时,光学仪器经常会丢失数据。大多光学式检测法检测精度不高、测量烦琐,往往只涉及砂轮表面形貌个别特征的检测,且不宜测量细粒度砂轮。只有白光干涉仪法对细粒度砂轮表面检测具有一定的优势,外界干扰少,测量范围大,不损伤砂轮,测量精度高,但设备价格较高,数据处理复杂,不便于工业化推广。
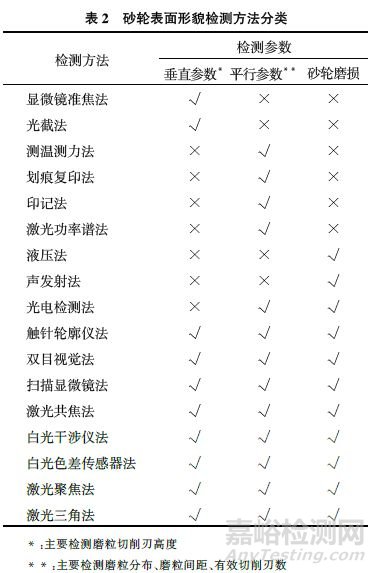
目前砂轮表面形貌检测方法还不够成熟完善,各类检测方法只能对砂轮形貌的一个要素或几个要素进行测量,若要从不同角度描述砂轮形貌特征,则需要各检测方法相互配合,取长补短。表2对各检测方法按照检测砂轮参数不同进行了分类。
总体而言,间接检测方法和直接接触式检测方法检测精度较低,不适合现在对研究结果的准确性、严谨性的要求。现在的检测方法主要朝着直接非接触式检测法发展,单是该类检测方法还不够完美,还有待进一步发展与完善。
对检测方法的研究应朝智能化、高效率、低成本在线测量、操作简单、取样范围广的方向发展,能够借助计算机程序对检测数据进行自动处理,并对砂轮的形貌特征各要素的特点进行精准描绘,如磨粒数、磨削刃数、有效磨粒数、磨粒密度、磨粒间距、出刃高度等。
我们认为,接下来应对光学式检测方法进行进一步研究,现存的光学式检测方法已能达到高精度的要求,如激光三角法、激光共焦法等;但很难实现在线测__量,检测成本较高。应加大研究力度,早日克服此类缺点,以实现砂轮表面形貌检测技术的跃升。


来源:AnyTesting


