您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2021-12-17 21:45
手术导航系统是一个集医学、影像学、计算机视觉、机器人技术、空间定位技术、虚拟现实交互、定制化制造于一体的多学科交叉系统,被越来越多地应用于神经外科、骨科、耳鼻喉科等手术中,辅助医生精准操作,提高手术的安全准确性。
背景
近年来,外科手术趋向于微创化,在带来创口小、失血少和恢复快等便利的同时,也缩小了医生的视野,不利于直接观察。借助医学影像技术,虽然可帮助术前诊断疾病、术中判断操作以及术后评估疗效。但目前,医学影像多采用二维图像,欠缺直观性,严重依赖医生的经验进行判断。另外,部分手术的病灶组织结构复杂,需频繁探查,一些隐藏较深的病灶甚至需要医生凭技巧进行盲操作,这都极大的影响了外科手术的准确性和安全性。
因此,类似于汽车导航,外科手术同样需要导航系统。借助导航系统,医生可以清晰直观的判断病灶位置,设定“目的地”;导航系统同时也会生成手术路径,辅助医生操作手术器械,明确当前位置和下一步应“左转”还是“直行”。
手术导航技术是一项多学科交叉的前沿科技。医生可直接观察病灶三维影像、规划手术、根据引导操作、接受充分训练,有效降低手术的不确定性,有利于手术快速准确的实施。
手术导航系统的发展历程
手术导航系统的发展大致可分为三个阶段:
第一阶段,框架立体定向仪。病人在局部麻醉后,在患处附近安装立体框架,并带着框架去做CT等影像检查,通过二维影像定位病灶,依靠框架引导找到手术靶点。该方法结构笨重,不便操作,不能实时反馈手术器械的位置。
第二阶段,无框架机械臂定位。利用机械臂的运动控制将手术器械固定到指定位置和方向,稳定性提高。但是,机械臂在安装和制造过程中存在误差,定位精度较低,引用范围受局限。
第三阶段,手术导航系统。结合了现代医学影像技术和立体定位技术,系统通过三维重建直观定位病灶位置和规划手术路径。通过空间定位技术实时反馈手术器械位置,精度得到有效提升,并在显示屏或增强现实设备中显示,辅助医生操作。
手术导航系统构成
手术导航,是以超声、X射线、CT、MRI等医学影像为基础数据,借助计算机、精密仪器和图像处理而发展起来的一种可视化图像引导手术技术。可通过三维数字化患者病灶组织,实时追踪手术器械位置,实现外科手术可视化和自动化,从而辅助医生或机器人更快速、准确和安全地完成手术任务。
手术导航系统通常需完成四项主要工作:
第一,三维模型重建。术前使用MRI、CT等医学影像数据进行三维模型重建,得到患者病灶的解剖结构数字模型,方便医生判断病灶位置和熟悉周边组织结构。三维模型也被用于后续的手术规划和术中引导,是手术导航系统的重要数据基础。
第二,手术规划与模拟。通过三维模型,判断病灶位置及其周边组织特征,建立手术路径并制定手术方案,用于术中引导医生或机器人操作。另外,医生也可使用计算机进行模拟手术,减小失误率。
第三,术中校准与引导。术中病人、器官、组织均会发生变形和移动,需及时校准三维模型和手术路径,以保证手术的准确性。同时,需为医生提供术区三维模型和手术路径图像,以保障视野、减少探查和引导操作。
第四,空间定位。通过医学影像、电磁和光学技术可测量术区组织和手术器械的空间位置和姿态,从而在手术导航系统中准确显示相对位置,可辅助医生沿规划路径操作,也可对机器人进行伺服闭环控制。
根据上述工作内容,可将手术导航系统划分为四个子系统:
● 医学影像的三维模型重建系统
● 手术路径规划与模拟系统
● 术中模型校准与可视化引导系统
● 空间定位系统
医学影像的三维模型重建
目前,医生主要通过观察超声、X光、CT和MRI等二维图像进行诊断。但是,二维图像无法直观展现病灶区域的立体解剖结构,需医生依靠经验进行推断;同时,图像存在走样、噪音、伪影等问题,影响医生准确判断病情。
三维模型重建是对客观物体在计算机中建立相同的三维虚拟模型。在手术前,可将患者的CT、MRI等二维医学影像原始数据导入三维模型重建系统,形成患者检查部位的三维可视化数字模型。重建的三维模型可直观显示病灶区域的血管、神经、骨质等组织结构,并可任意旋转、缩放和测量,用于精准定位病灶位置,明确病灶与周围组织的空间毗邻关系,有效辅助医生进行准确诊断。
三维模型重建除用于辅助诊断,还可用于术前的手术路径设计和风险评估,术中的模型校准,术后的效果评估;另外,还可用于模拟手术操作,让医生得到充分训练,更清晰地掌握手术过程,提高手术的准确性和安全性
根据成像原理,三维模型重建可分为三类:基于CT影像、MRI影像和超声影像的三维重建。
(一)基于CT影像的三维重建
CT(Computed Tomography),全称为计算机断层扫描,是用X射线束对人体某部一定厚度的层面进行扫描。常规CT扫描可以理解为把人体切成一个个薄片,是多层的X射线扫描。薄片厚度可以是0.5-1厘米,越薄精确度越高。
在此基础上发展形成了螺旋CT(Spital CT)和锥形束CT(Cone Beam CT,CBCT)。前者在扫描时,X射线呈螺旋形,可获得连续层面的信息,避免了常规CT扫描时遗漏小病灶的弊端。后者利用三维锥形束X线进行扫描,对于牙齿根管系统、下颌骨等细微硬组织的成像质量好,但对软组织成像清晰度较差。
另外,随着C形和O形臂X光机的推出,可从不同角度对器官进行二维成像,获得的多幅照片也可进行三维重建,为术中三维模型重建提供新方法。
基于CT影像的三维重建对头颈部、胸部、冠状动脉等大血管、骨骼系统疾病的诊断价值较高。但是,CT扫描辐射剂量较普通X射线检查大,故怀孕妇女不能做CT检查。
(二)基于MRI影像的三维重建
MRI(Magnetic Resonance Imaging),全称为磁共振成像,是利用磁共振现象从人体中获得电磁信号,并重建出人体信息。MRI不会产生辐射,可以得到任何方向的断层图像。
基于MRI图像的三维重建对软组织滑膜、血管、神经、肌肉、肌腱、韧带、和透明软骨的分辨率高,在脑部检查中有着不可替代的作用。但是,MRI扫描用时较长,并且会产生巨大磁场,所以装有心脏起搏器等金属设备的患者不能做MRI检查;监护仪器和抢救器材也无法带入MRI检查室,限制了危重病人的检查。
(三)基于超声影像的三维重建
超声成像(Ultrasonography)使用超声波穿透人体,当声波遇到人体组织时会产生反射波,通过计算反射波成像。三维超声系统可使用一体化的容积探头,同时产生多个超声断层图像,通过软件计算即可重建三维模型。
相较于CT和MRI,超声成像成本低,无强磁场和电离辐射,在诊断用功率范围内对人体无伤害,可经常性反复使用。另外,超声成像刷新速率高,可提供实时动态影像。目前,三维超声多用于心脏、消化系统、泌尿系统以及产科检查,但对肠道等含气较多的器官诊断准确率会降低。
(四)相关技术
基于医学影像的三维重建技术主要涵盖图像分割和三维重建两部分内容。
1. 图像分割(Image Segmentation)
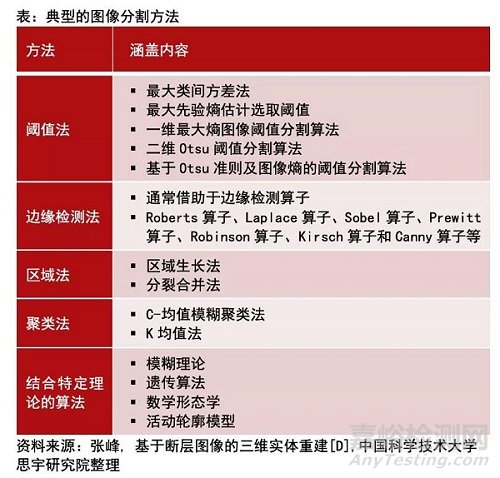
图像分割是一个根据区域的相似性与特征把图像分割成若干区域的过程。医学图像分割的目的就是把感兴趣的区域提取并显示出来,并使其尽可能地接近解剖结果,为临床诊疗和病理学研究提供可靠的依据。典型的图像分割方法包括:阈值法、边缘检测法、区域法、聚类法和与特定理论结合的算法。
2. 三维重建(3D Reconstruction)
医学的三维模型重建是对三维空间数据场的可视化,常基于两类算法开展:
面绘制算法(Surface Rendering)
面绘制算法首先需在三维空间数据场中构造出曲面、多边形平面等几何图元,然后再用计算机图形学技术实现画面绘制。面绘制算法发展已经比较成熟,主要可以分为基于轮廓线和基于体素两类方法。
体绘制算法(Volume Rendering)
体绘制算法不构造几何图元,在为每个体素赋予颜色和阻光度,并考虑其对光线的透射、发射和反射作用后,直接由三维空间数据场生成屏幕显示的二维图像,可分为投射、消隐、渲染和合成四个步骤。由于体绘制技术没有构造中间几何曲面或实体,因此只适用于可视化显示,无法将其转化为实体模型。

手术路径规划与模拟系统
根据患者病灶处的影像,医生结合病理学和解剖学知识和经验进行手术规划,包括手术方法、手术流程、手术切口和路径等,形成手术方案。使用传统二维断层图像,严重依赖医生经验判断病灶位置和评估手术风险,对手术的准确性和安全性存在一定制约。
通过三维模型重建,可为医生提供更直观、更精准的病灶位置、空间解剖结构、形态和容积等信息,医生可任意旋转、剖切和测量三维模型,获得更多信息,作为手术规划的重要参考。
完成手术规划后,一方面,将手术方案输入计算机,在软件中建立虚拟手术环境并模拟手术过程,更精确的修正切除范围、切除路径、切口位置等。这样可预知手术的要点与难点、明确规避的血管与神经、评估术后的效果,提高手术的预见性,减少术中的探查时间,提高手术准确性。
另一方面,将手术规划输入人机交互的虚拟现实系统,医生通过操作杆控制虚拟环境中的手术器械,完成探查、切除和缝合等手术流程,可用于手术的训练与教学,对完善手术方案、降低失误率和提高安全性有重要意义。
(一)虚拟现实技术(Virtual Reality,VR)
虚拟现实技术利用计算机生成一种模拟环境,是一种可使用户沉浸其中的交互式三维动态视景和行为系统仿真环境。通过患者的三维模型重建和虚拟手术环境,医生通过交互设备即可在虚拟环境中开展与实际手术非常接近的模拟手术,达到训练和教学目的。
瑞士巴塞尔大学(University of Basel)研发出的SpectoVive系统,可三维重建病灶模型,加快渲染速度以使VR佩戴者不会眩晕(至少180帧/秒,即单眼90帧/秒)。手术医生可在虚拟环境中直接观测实时3D影像,制定合理的手术方案。另外,该系统还可进行流体阴影渲染(例如血液和组织液),创建更逼真的环境。医生可在VR环境中随意放大和多角度查看骨骼模型,同时对比常规CT图像,制订手术计划。
(二)触觉(Haptic Feedback)
可在VR交互装置上安装触觉反馈,以模拟VR环境中手术器械触碰不同组织时的触感,例如对不同介质穿刺时所遇阻力不同,使模拟更准确,给使用者更逼真的感受。
英国的Fundamental VR公司在建立膝关节手术虚拟手术环境的基础上,通过操作杆为使用者提供触觉反馈。操作杆的末端装有一直触笔,移动触笔时虚拟场景中的注射器也随之移动,在针头触及肌肉、脂肪、骨膜、骨头和关节囊时,机械臂会为使用者带来不同的阻力。该系统可让医学生充分训练,减小实际操作时的风险。
(三)3D打印(3D Printing)
3D打印是快速成型技术的一种,以三维模型为基础,运用金属粉末或塑料通过逐层打印构造实体。以术前的三维重建模型为基础,采用3D打印可以将模型实物化,方便医生观察和讨论病情,方便与家属沟通治疗方案。例如,在人工髋关节置换术中,使用患者CT影像三维重建髋关节模型,并3D打印出实体。医生可在术中快速确定髋臼的定位和损伤,以及髋臼螺钉的入钉位置、角度、长度等,提高手术精确度和效率。

来源:MedRobot


