您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-04-12 12:43
研究背景
根据机器人所使用的材料,可以将目前的机器人分为刚性机器人与软体机器人。相对于刚性机器人,软体机器人拥有更大的自由度,在灵活性上具有较大的优势。在过去的几十年中,研究人员研究出了各种软体机器人,实现了许多传统机器人所难以实现的功能,如柔性抓取,仿生爬行等。软体机器人的驱动源也多种多样,包括气动,介电,化学物质和折纸等。
折纸作为一门从二维到三维映射变换的艺术,是一种从平面到空间非光滑复杂曲面的拓扑同胚变换。折纸折痕的拓扑形式,以及折纸机构方式变化,在各个研究领域中都一直受到研究者们的高度关注。其中,一类构型的折纸由Birtua Kresling提出,领域内将其命名为Kresling折纸构型,自然,相应的折纸驱动单元被命名为为Kresling驱动单元。折纸机器人的机器人又分为:磁驱,气动,电磁电机,形状记忆合金式等。去除引线的束缚,磁驱的方式因为可以无线控制大大拓展了这类型机器人的运动场合。
针对于医疗微创辅助设备应用较为缺乏研究的前提下,研究团队提出了一种基于Kresling驱动单元的磁驱折纸爬行机器人。为了拓展该类型机器人对不同地形的适应性,团队将该机器人的运动设计仿生于自然界的尺蠖昆虫,加之磁场驱动的优势,将其进行了结构小型化设计,使其具有基本的爬行和转弯能力同时,也具备药物储存和释放的功能性,可应用于微创辅助设备,大大拓展了该类型机器人的应用领域。
创新点
斯坦福大学的Ruike Renee Zhao团队报道了一种磁控式的折纸机器人。该团队在这项工作中通过有限元分析以及理论上推导和验证了爬行磁驱软体机器人上运动时所需的扭矩值,然后通过磁场控制对爬行机器人的扭矩进行控制,以实现对爬行机器人的前进和转向运动。同时,磁驱的优势在于可以提供无线驱动,从而实现机器人的小型化和绿色能源化的机器人设计。最后,团队通过实验展示了机器人的药物储存和释放能力,以此说明了所提出的机器人可以胜任医疗微创辅助设备的工作,如运输和释放药物进行靶向治疗。
文章解析
文初,结合有限元仿真,团队对Kresling驱动单元的爬行机器人的结构进行了详细介绍,其中包括Kresling驱动单元的驱动原理,输出扭矩。其中,爬行机器人如图1所示图片
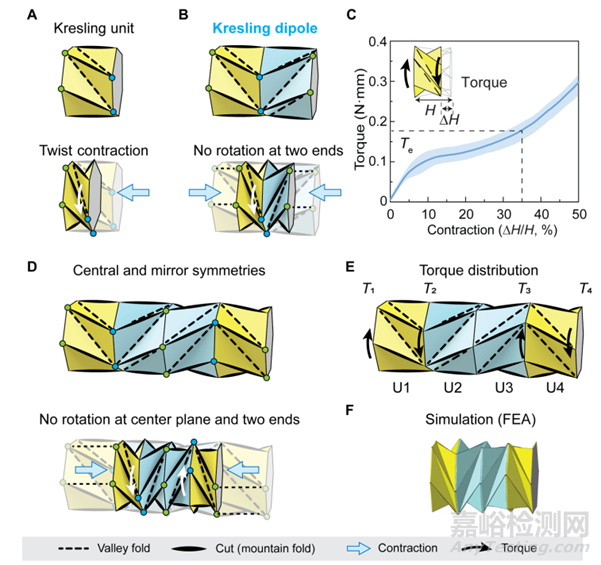
图1:基于Kresling驱动单元爬行机器人构型:(A) Kresling驱动单元示意图;(B) 由两个具有反向折痕方向的驱动单元制成的偶极子示意图;(C) Kresling驱动单元的扭矩实验测量曲线;(D) 由两个Kresling驱动偶极子制成的爬行机器人示意图;(E) Kresling爬行机器人驱动所有单元所需的扭矩;(F) 对所有驱动单元同时收缩时的有限元仿真验证结果。
根据以上机器人实现运动所需的扭矩分布结果,团队对应布置了了四个磁化方向,用于分配爬行机器人的扭矩,以实现机器人的运动:
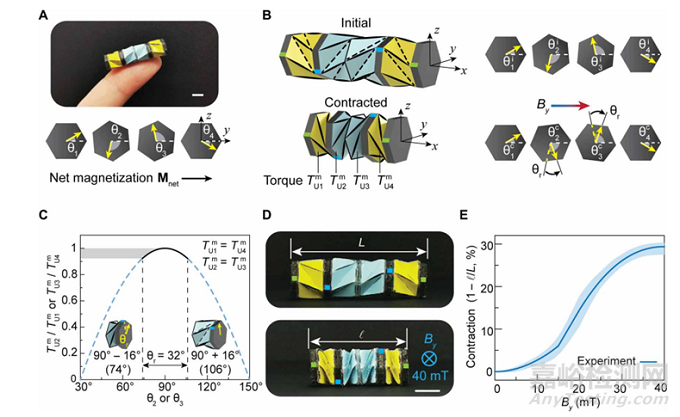
图2:爬行机器人的磁力驱动机构; (A)爬行机器人样机;(B) 初始状态和收缩状态下的机器人结构和磁化示意图;(C)机器人收缩期间单元之间的扭矩比;(D) 40 mT 磁场强度下的机器人收缩示意图;(E) 不同磁场强度下机器人收缩百分比值
在搭建完磁场后以及对机器人的收缩长度进行研究之后,团队展示了机器人在不同磁场强度下爬行机器人的运动特性,其中包括爬行机器人的步距和速度特性:
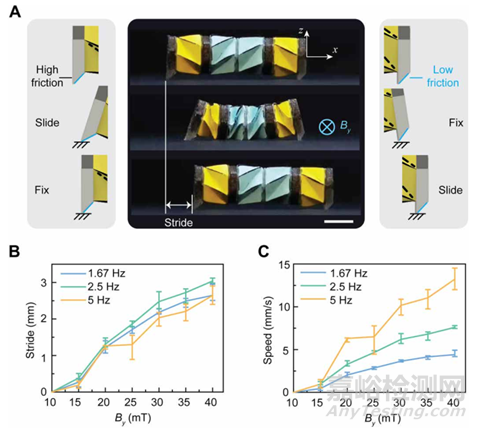
图3:机器人的爬行机构;(A)爬行机器人在 40 mT 磁场强度下的单步步距;(B) 不同磁场强度和频率下爬行运动的幅值和 (C)速度特性
在初步验证该机器人具有初步运动的能力后,团队开始对提出的爬行机器人更为复杂的运动进行相应控制,让机器人按照既定的路线进行跟随爬行运动,包括转弯和循迹:
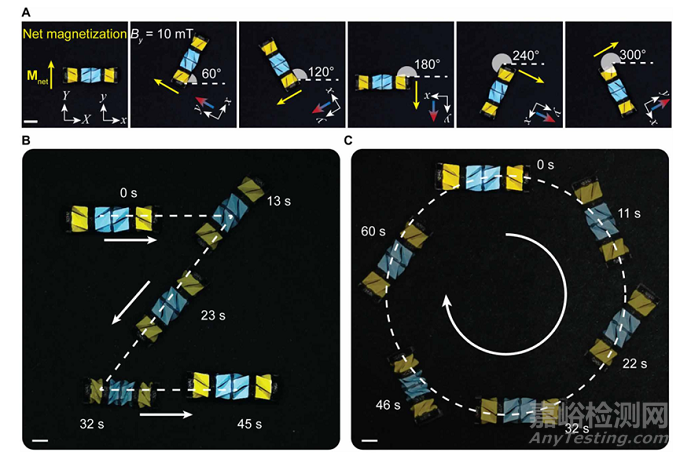
图4:爬行机器人的转向和导航;(A) 爬行机器人的转向原理;(B) 爬行机器人按照既定时间沿 “Z”路径进行循迹;(C) 机器人按照既定时间沿“O”形路径进行循迹
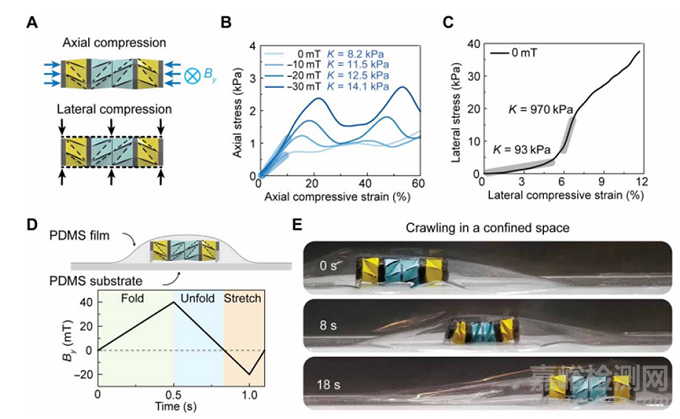
图5:爬行机器人的各向异性特性;(A) 轴向和横向压缩施加示意图;(B)在不同磁场下沿轴向的压应力-应变曲线;(C)在不同磁场下沿横向的的压应力-应变曲线;(D)在密闭空间中爬行的示意图;(E) 前进运动
文末,团队开展了爬行机器人运输药物的实验,以此来说明该类型机器人具备微小型药物的运输和释放能力,面向微创辅助设备,可以进行靶向治疗:
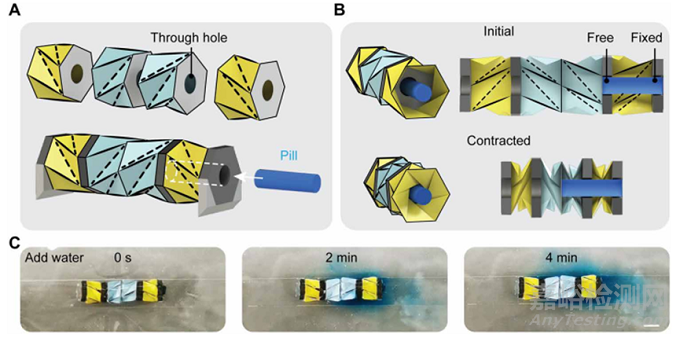
图 6.爬行机器人的药物运载和释放示意图(蓝色为药丸);(A) 带通孔结构的改进型爬行机器人的示意图,通孔用于放置药丸;(B) 爬行机器人在初始状态和收缩状态下的药丸位置;(C) 所运载的药丸逐渐溶解在水中的过程示意图
读后感
基于上述特点,折纸机器人未来将在工业生产、医疗救援、军事探测等领域具有巨大的应用前景。团队在本设计上,提出了一种可以运输和释放药物的磁驱式折纸机器人,使其在医疗微创辅助设备的应用上有很大的应用空间和工程背景。然而,这类型的折纸机器人在极端环境因素下的动态特性(如变形、稳态频响和瞬态响应特性),目前还不得而知。此外,其极端力学特性在极端环境因素作用下,其响应会发生变化,此时其理论建模,分析和实验也需要进一步去探索。

来源:WEST可穿戴电子


