您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-08-30 12:28
在眼科手术中,眼内手术的手术目标组织位于眼球内部,其以晶状体后膜为界,又分为眼前节手术(例如白内障超声乳化切除术和小梁切除术等)和眼后节手术(例如玻璃体切除术、视网膜静脉血管插管术和视网膜静脉血管搭桥术等)。尤其眼后节手术,目标组织最为精密、操作精度要求最高。
比如在视网膜静脉插管术中,医生要在显微镜视野下操作,将显微注射针穿过巩膜切口并刺入25um、平均直径在80-120um的堵塞血管中,并需要保持2mins注册溶解剂,而医生手部颤抖平均幅度达到156um,因此该类手术已经超过了人类手术操作的精细度极限;另外,75%的器械和血管的接触力小于7.5m牛顿,医生只能感知其中19%的接触力,可见人手有限的感知能力也进一步限制了手术操作;第三,眼球平均直径24-25mm,手术器械的运动受到巩膜切口的约束,医生小幅度的误操作就会引起眼球撕扯,即内部空间狭小易造成二次损伤;第四,即使在显微镜下,由于视野受限医生也很难对深度信息进行感知。
02解决方案—眼科手术机器人
于是,运动精度高、稳定性好的手术机器人辅助或者代替医生进行手术,成了科学界解决以上痛点的研究方向。眼科显微手术机器人需要复合机构学(研究机械中机构的结构和运动,如连杆、凸轮、齿轮等等)、显微外科学、生物力学、传感器技术等等多种学科,以下讲讲显微手术机器人的关键技术:
(一)眼组织的生物力学分析
就是说眼科机器人的设计指标必须符合眼球的各项生理参数,运动范围总不能超过眼球的直径吧,机器人的操作力度不能超过眼组织的承受极限吧,机器人的操作路径要符合眼球内部的结构吧等等。目前研究方法主要是通过数值仿真法和模拟实验法。目前集中在软件仿真或者模型试验,存在局限,未来如果开发人体眼球模型并优化检测方法,可以得到更真实的眼组织生物力学数据,并且将生物力学融合到机器人的控制中,会对机器人发展有里程碑式的突破。
(二)构型设计
在眼内微创手术中,手术器械需从巩膜刺入点插入病人眼球内,围绕该点运动来实施手术操作,即绕刺入点的三维转动和沿着器械轴线的移动。研究者称为RCM机构。该机构的设计是眼科机器人本体构型的关键所在。
目前有3种rcm方法:1、采用机械约束下的运动机构来实现,比如达芬奇机器人,这种机构刚度高,安全性好但较为庞大,适应性差;2、被动式RCM,比如AESOP机器人,平行四边形的设计是安全性得到保障,但是影响了运动精度和刚度;3、主动式RCM,通过软件算法来实现,但是可靠性低,适合在安全性不高的场景下应用,可保证高刚度低成本。目前来看,第一种方式是最容易也是安全性最好的。第一种方式有以下几种模式:
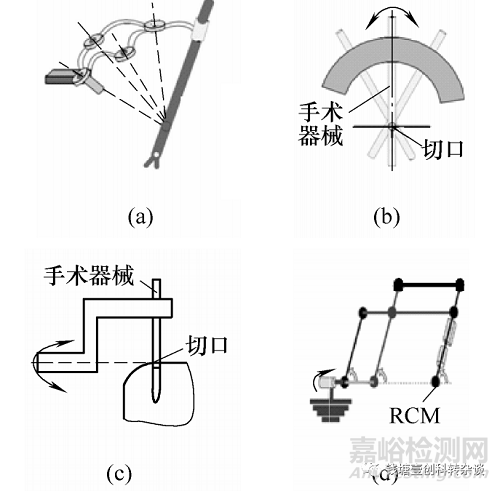
a.球形结构,球心为RCM,刚度和稳定性低;b.圆弧轨道结构,圆心为rcm,但是轨道驱动问题不易解决;c.轴驱动结构,只要使体壁切口位于转动轴的轴线上,就具有远程运动中心;d.双平行四杆机构,两个转动轴的轴线交点即为RCM。后面也衍生了多种自由度的rcm机构。
对于眼内手术来说机器人操作过程中,其rcm需要与巩膜上的刺入点实现实时重合,保证结构紧凑、灵巧、精密,同时具有很好的刚性和稳定性。
(三)多维度的微力感知与控制
眼科显微手术涉及到器械与视网膜薄壁、视网膜血管等精密眼组织的操作,为保证手术安全,手术中需要获取包括器械的末端位置、目标眼组织的位置以及器械与眼组织的作用力等多维信息,以此为医生提供全方位的操作引导或反馈,从而实现高精度的手术操作。
眼科手术中的微力检测主要有 2 种方法。一种是使用商用微型传感器(例如 Nano 17)作为机器人的力感知器件,如 Preceyes 机器人 等。由于体积相对较大,Nano17 传感器只能在眼球外进行测量,检测的力信息同时包含了器械与眼内组织的接触力以及器械与巩膜切口的摩擦力,因此不能精确地反映器械在眼内的操作力。另一种力检测方法是将 FBG 嵌入手术器械末端 ,对器械末端与眼组织的接触力直接进行检测。该检测方法能够隔绝眼外摩擦力的干扰,精确地反馈器械与视网膜表面的作用力。同时,FBG 具有很高的灵敏度, 基于FBG 集成的力感知器械的分辨率能够达到 0.25 mN,达到了大多数眼科手术的力感知要求,因此在将来的眼科手术机器人中,基于 FBG 的力检测方式将会得到越来越多的应用。
在目标眼组织的检测方面,图像识别和重建是主要的研究方法。卡耐基·梅隆大学的研究者们针对眼底血管的识别和重建,于 2016 年提出了一种EyeSLAM 算法,可以对视网膜血管实现 30 Hz的实时定位和重建,具有旋转不变性,并能够适应不同的光照条件。天主教鲁汶大学的研究者也采用图像方法对眼底视网膜血管的重建进行了研究,得到了眼底视网膜的地形图。随着更多高鲁棒性的算法的提出,基于图像识别重建的方法将会极大地提高眼组织的检测精度和效果。
多维信息传感技术能够提供术中器械与眼组织的交互信息,对于保障手术的安全精密操作具有重要作用,因此也是推动眼科机器人的临床应用的关键。但是目前多维信息的研究大多为离线验证,并未应用到眼科机器人的实验验证中。因此,对多维传感信息进行融合并实时地反馈给操作者,是未来的研究方向。
(四)精密运动控制技术
眼科机器人的控制需要在适应医生操作的基础上,具有足够的可靠性和稳定性,以保证手术过程中的操作安全。眼科机器人目前主要有2 种控制方式:主从式和人机协同式。
在主从控制中,主操作器的运动经缩放后映射到从机器人的运动空间,医生的操作尺度被放大,有助于医生实施更为精密的手术操作,目前大多数眼科机器人均采用主从操作方式,如 Preceyes、IRISS等。
与主从控制方式不同,人机协同控制方式允许医生直接把持安装在机器人末端的手术器械,医生的操作意图通过力传感器传递给机器人,从而对机器人进行控制。在人机系统控制方式下,医生的手部颤抖可以被有效地滤除,医生也能获得更为直观的操作环境。SHER 机器人是人机协同控制方式的代表。
例如视网膜静脉血管插管术,眼科机器人需要在眼球巩膜切口的约束下,完成特定手术动作,手术操作中手术器械不可避免地会对巩膜切口施加过大的接触力,或者触碰视网膜的非病变位置。为实现手术的安全精密操作,必须根据力、位置等传感信息对机器人进行反馈控制,或者通过术前的路径规划,对机器人的运动施加虚拟约束。科学家提出了基于多刺入点约束的机器人运动规划算法,来实现器械末端平行于视网膜表面的运动。或者将器械与巩膜的接触力信息反馈给机器人,提出多变量导纳控制算法,对手术过程的危险动作(例如拉扯巩膜切口等)进行主动修正。完善的眼科机器人控制算法会保证手术过程中的安全,可以更进一步地推进眼科机器人临床应用。未来的研究中需要综合考虑眼球的空间约束、特定手术动作的要求以及多器械的协同控制等因素。同时,基于力信息、图像信息等多维传感信息,设计运动约束算法,对机器人的运动施加虚拟约束,将会是未来的研究热点。
03眼科机器人技术迭代介绍
下图显示为主要类型手术机器人分类及其简要描述:
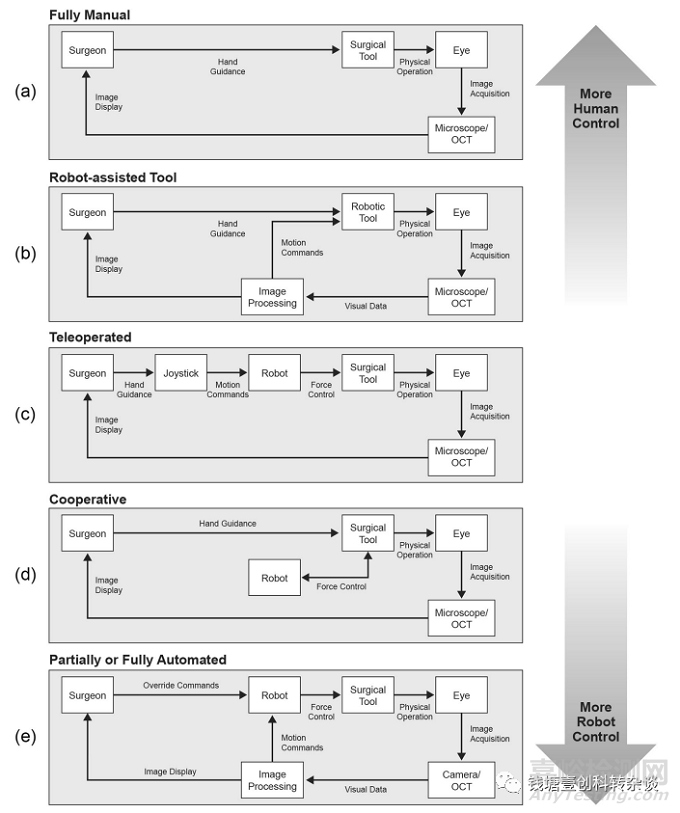
(a)在传统外科手术中,外科医生控制着外科手术工具,并使用光学显微镜作为视觉反馈;
(b)在机器人辅助工具中,手术工具本身被修改为一个微型机器人系统,外科医生控制这个工具进行手术,而机器人工具提供震颤消除、深度锁定和其他功能。这种类型的一个例子是“MICRON”;
(c)在遥控机器人手术中,外科医生通过操纵杆控制机器人系统,并使用光学显微镜或数字平视显示器作为视觉反馈。操纵杆运动直接映射到机器人运动,因此可以实现诸如触觉反馈、震颤过滤和运动缩放等优点。这种类型的示例包括“RAM!S”、“Preceyes 手术系统”和“眼内机器人介入手术系统 (IRISS)”;
(d)在协作机器人系统中,外科医生与机器人系统同时握住和控制手术工具,并使用显微镜和/或 OCT 作为视觉反馈。外科医生对手术工具的运动保持直接的手动控制,而机器人系统为手部震颤提供辅助补偿,并允许手术工具的长时间固定。这种类型的一个例子是来自“鲁汶天主教大学”的系统;
(e)在部分或完全自动化的系统中,机器人系统与显微镜和/或 OCT 紧密集成,为机器人系统的运动命令提供反馈和指导,机器人系统直接握住和操作手术工具,特定程序或程序步骤由机器人系统自动执行,同时外科医生通过提供视觉反馈进行监督命令。这种类型的一个例子是“眼内机器人介入手术系统(IRISS)”。
以下,依次介绍下上述典型系统代表。
(一)MICRON
2010 年,卡内基梅隆大学机器人研究所和约翰霍普金斯大学合作开发了 MICRON,一种有源手持式微型机械手。通过图像引导方法,手持设备减少了手部震颤,从而在手术过程中提供平稳的运动。据报道,工具尖端的位置误差减少 52%。该工具通过对离体猪眼进行视网膜静脉插管进行评估,与不使用增强工具的情况相比,成功率从 29% 提高到 63%。
MICRON 在 2015 年得到了进一步改进,尽管结合了 Gough-Stewart 平台,该平台限制了工具尖端附近的远程运动中心。改进的工具在不同条件下进行了评估,以证明轨迹跟踪误差≤20 µm,手颤抖减少了 90%。研究人员展示通过将力感应针集成到 MICRON 中来检测拉伸乙烯基膜穿刺的能力。此外,该小组还展示了一种自动位置保持功能,该功能允许工具尖端在人工静脉内保持更长的时间,并显着减少静脉穿刺后工具尖端的运动。然而迄今为止,所有评估研究都只在没有临床评估的人工或动物眼模型上进行。
(二)RAM!S
2013 年,慕尼黑工业大学机器人与嵌入式系统系推出了 RAM!S,这是一种混合并联-串联机制,其中包括用于驱动的压电电机。在运动学上,该机构由两个平行耦合的关节、一个棱柱形关节和一个可选的旋转关节组成,共同实现工具运动的6个自由度 。研究人员声称,与更常见的串联机构设计相比,这种机构的优势包括更高的刚度和更高的精度。RAM!S 在物理上也很紧凑(94±28×33.5× 18.5mm),旨在固定在患者头部以减轻患者运动的影响。其他引用的指标包括5µm的刀尖位置精度、306g的总重量和28×28×28mm 的刀尖工作空间。
同一团队开发了一种虚拟夹具控制方法,并通过实验评估了其在离体猪眼中的使用。这些虚拟夹具包括 RCM 的虚拟约束和自主 RCM 调整,其他工作使用 RAM!S 设备开发遥控功能,使用具有力反馈功能的控制器,实施了位置误差控制方案。由此产生的系统允许外科医生进行精确和舒适的显微操作。现在也已使用 OCT 对针进行视网膜下深度跟踪。在研究人员的最新工作中,通过使用组织模型和离体猪眼的一系列实验进行了评估证明,RCM 的操作精度在 1 毫米以内。研究人员使用该系统在插入模型期间跟踪针头的深度,通过显示 OCT 生成的针头体积扫描来补充显微图像。研究人员声称,在他们的系统的帮助下,外科医生可以更多地关注在视网膜下注射期间的决策,而不是对工具的灵巧控制。
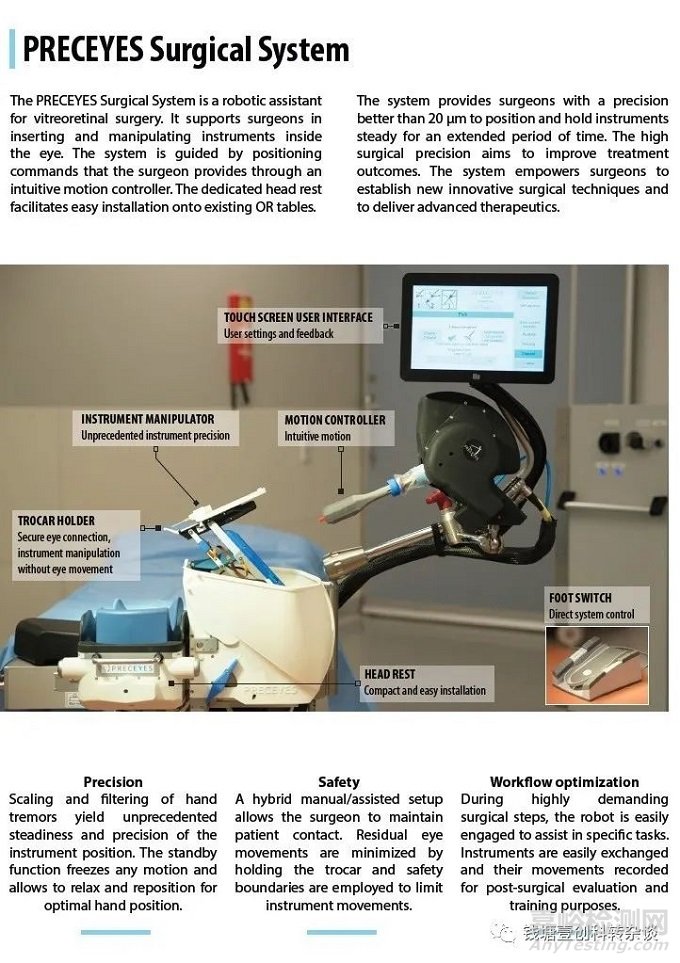
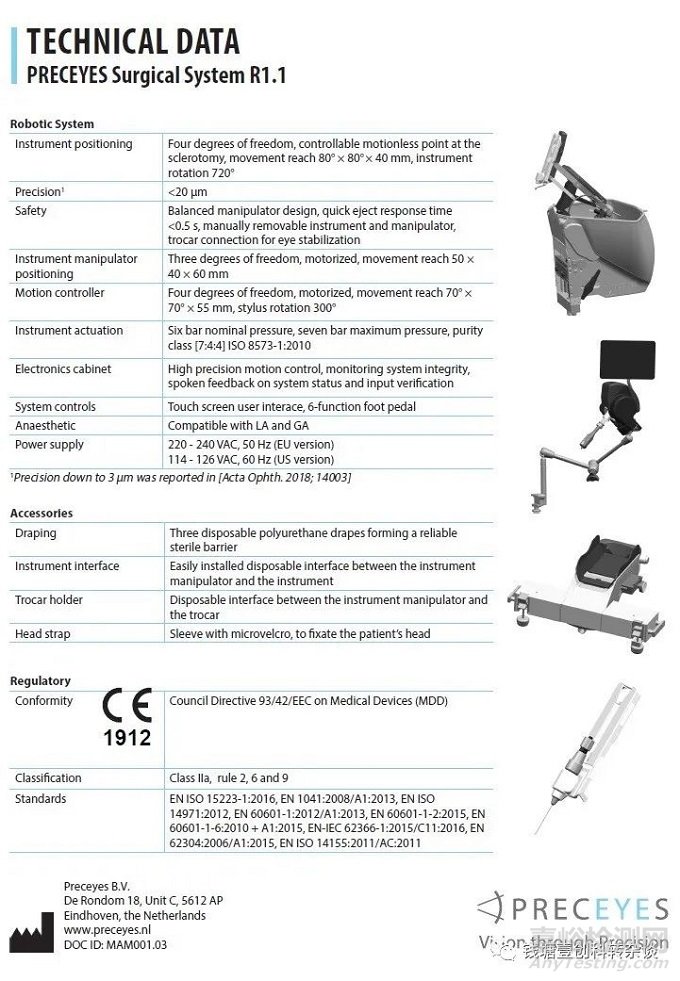
(三)Preceyes 手术系统
荷兰埃因霍温科技大学和后来的大学衍生公司 Preceyes BV 开发了 Preceyes 手术系统作为玻璃体视网膜手术的高精度设备。机器人系统由外科医生手持的输入操纵杆和控制手术器械和执行眼内组织物理操作的机器人系统组成。机器人系统通过头枕牢固地固定在手术台或 Stryker上与手术切口对齐。通过移动输入操纵杆,外科医生可以通过切口引导工具在整个眼内工作空间的运动,并使用标准手术显微镜作为视觉反馈。
机器人系统的设计基于许多早期手术机器人系统常见的平行四边形连杆。这种设计提供了一个机械远程运动中心,并通过串行连接提高了工具尖端的位置精度。可调节配重增强了系统的安全性和稳定性,该配重可最大限度地减少所需的关节扭矩,并在发生断电或系统故障时将系统保持在固定配置中。发明人报告了 10 µm 的工具提示位置分辨率,并通过在活的麻醉猪中创建静脉闭塞初步展示了 Preceyes 的能力。
2018 年,Preceyes 手术系统被用于进行临床试验,以比较机器人辅助手术与传统手术。在这项研究中,在需要去除视网膜的患者和需要视网膜下注射的患者中进行了两组试验。在第一阶段,Preceyes 系统用于使用斜面针从黄斑表面提起视网膜膜瓣。本研究招募了12名黄斑裂孔患者,这些患者接受全身麻醉,维持肌肉放松和机械通气,以确保消除自主呼吸。垂直于视网膜的工具提示定向运动被限制为 10 µm 的增量。一旦定位,外科医生就会在控制软件中设置一个虚拟边界,这样就可以禁止任何额外的深度命令,并且可以防止医源性视网膜损伤。
在第二阶段,使用 Preceyes 对三名因视网膜下出血导致中心视力丧失的患者进行视网膜下注射重组组织型纤溶酶原激活剂 (rtPA)。在这项研究中,三名患者被置于局部麻醉下,机器人协助将 0.025-0.10 ml rtPA 输送到视网膜下空间。在一名患者中,白内障的短暂术中恶化妨碍了对套管尖端的清晰观察,并且是手动完成的,但除此之外,所有三名患者都成功进行了视网膜下注射。
Preceyes已展现出机器人系统的安全性,机器人辅助程序在所有试验中减少了整体的无意视网膜接触和微出血,且没有遇到系统故障或技术故障。虽然机器人辅助外科医生的表现比无辅助外科医生慢,但手术并发症的减少和机器人系统精度的提高表明将手术机器人技术纳入眼内眼科手术领域的光明前景。目前Preceyes 已经获得 CE 认证。
(四)鲁汶天主教大学系统
2014 年,鲁汶天主教大学的微型和精密工程组设计出了一个遥控机器人系统,该系统具有运动缩放、震颤补偿和缩放力反馈。该系统是一个共同操纵的机器人系统,旨在通过减少手产生的震颤的幅度并促进长时间保持固定位置的能力,为外科医生提供更高的稳定性和精确度。该装置由一个平行臂机构和一个机械远程运动中心组成,并通过一个球形机构进行控制。该系统用于对体内猪眼进行视网膜静脉插管,针尖稳定静脉位置超过 3 分钟,并在 18 只眼中的 15 只眼中试验成功,且没有报告机器人设备的技术故障。
在取得初步成功之后,研究人员在《生物医学工程年鉴》中报告了他们新的研究结果。他们完成了世界上第一个人体机器人辅助视网膜静脉插管的临床评估。在这项研究中,四名视网膜静脉阻塞 (RVO) 患者通过 I 期临床试验在鲁汶大学医院接受治疗。该试验涉及将 Ocriplasmin 注射到目标视网膜静脉(估计直径 100-150 µm),注射持续时间长达 10 分钟。成功的结果证明了借助机器人技术使用立体显微镜和合适的眼内照明进行视网膜静脉插管的技术可行性。该机器人系统现在由该大学的衍生公司 MYNUTIA 开发,项目负责人正在努力将开发的技术商业化。
(五)眼内机器人介入手术系统(IRISS)
IRISS 是加州大学洛杉矶分校通过机电一体化和控制实验室与斯坦眼科研究所合作开发的。这项工作的总体目标是开发一种机器人手术系统,该系统能够通过增强现实远程操作和全自动化相结合来执行前部和后部眼内手术。
IRISS于 2013 年首次提出,旨在远程执行广泛的前段和后段外科手术。该机器人系统具有快速工具交换机制,能够安装任何市售的手术器械,并在几毫秒内在眼外进行切换。此外,该机器人系统的一个新颖方面是其双臂配置,通过在机械确定的远程运动中心附近的两个手术切口,可以在眼内同时使用两个工具。外科医生通过一对定制的操纵杆从远处远程操作机器人系统,这些操纵杆通过一系列运动缩放和震颤减少技术映射到机器人运动。这些功能有助于提高安全性并改善外科医生的表现。该系统通过集成到数字显微镜中的立体摄像头实现三维视觉反馈,并通过平视显示器向外科医生显示。
IRISS 在标准手术室中使用离体猪眼在一组常见的白内障和玻璃体视网膜外科手术中得到验证 。外科医生能够成功地进行远程操作前晶状体撕囊、粘弹性注射、水分离、晶状体抽吸、视网膜静脉插管和玻璃体切除术。特别是,进行了视网膜静脉插管以证明 IRISS 执行准确定位任务的能力。在许多手术中,第二个手臂被用来控制一个额外的工具,并展示了 IRISS 同时操作两个手术器械的独特能力。IRISS 是第一个成功完成曲线撕囊和整个白内障手术的机器人系统。
然而,随着飞秒激光系统的引入和其他新兴技术的进步,白内障手术的特定步骤(如角膜切口、撕囊和晶状体破碎)可以在无需人工操作眼内组织的情况下完成。虽然这些基于激光的方法自然地提高了安全性并减少了手术并发症,但它们无法去除乳化皮质材料或植入人工晶状体植入物。这些步骤仍然必须由外科医生手动执行,并且由于人类外科医生的生理限制和传感能力的不足,手术并发症仍然存在。
为此,IRISS 与 OCT 系统集成,该反馈用于执行自动白内障摘除。在这项工作中(上图),外科医生手动准备离体猪眼,机器人系统对眼睛解剖结构进行建模,规划提取轨迹,并自动从囊袋中取出晶状体材料。该系统自动将自身与眼睛对齐,并引导冲洗/抽吸机头通过角膜切口。然后使用图像处理算法从一组术前 OCT 体积扫描中识别和建模前段内的解剖结构。系统使用该模型来规划通过囊袋的工具提示轨迹,该轨迹经过优化以移动晶状体材料并提高手术效果和效率,同时保持安全性。然后系统跟踪该轨迹,同时根据尖端到组织的距离控制冲洗和抽吸力。虽然晶状体提取步骤是全自动的,但为外科医生提供了术中监督和手动干预能力。围绕工具尖端定位的术中 OCT 扫描实时显示给外科医生。
IRISS最新实验,OCT 集成机器人系统在离体猪眼的临床环境中进行了评估 。结果表明,所有 30 项试验均避免了后囊膜破裂。对 25 个样本进行了完全晶状体提取——其中 5 个样本在术后评估中发现了隐藏在 OCT 无法成像的虹膜后面的晶状体材料的微小颗粒。
IRISS 的未来工作包括将增强现实集成以及将特定的自动化程序集成到手术体验中。研究人员设计了一个手术系统,其带有增强现实驾驶舱,集成了多感官反馈,包括显微镜上的图像叠加和 OCT 反馈显示器、听觉和触觉反馈。在虚拟环境中进行研究,以证明添加这种反馈可以提高外科医生在视网膜前膜剥离过程中的表现。要求具有一系列技能的参与者使用两组反馈进行虚拟视网膜前膜剥离:(1)仅视觉和(2)具有触觉反馈的视觉。结果表明,当视觉显示完全增强时,任务完成时间和视网膜损伤减少。
04手术机器人在眼科的未来应用
将机器人系统纳入眼科手术实践有望提高精度,并有可能实现目前不可行的全新外科手术。基于激光的外科手术(如飞秒激光辅助白内障手术)已经提供了超人类水平的准确性和安全性,以降低术中和术后并发症的发生率。此外,显微镜集成的 OCT 改进了可视化,并通过结合在显微镜视图旁边显示的实时 OCT 图像馈送,引入了在手术过程中准确感知深度的能力。尽管有这些技术进步,但手术并发症仍然存在,因为眼内组织的操作仍然依赖于人类的手术技能。
1.白内障手术
对于白内障手术,机器人机械手可以与现有的飞秒激光系统集成以执行完整的白内障摘除术。虽然白内障手术很常见,并且与其他眼内手术相比其并发症发生率较低,但在一项为期 4 年的随访研究中,67% 的手术病例中检测到后囊膜混浊 (PCO) 。晶状体残余物的感知和可视化不足导致晶状体从囊袋中不完全移除可导致PCO。机器人系统的未来应用是通过改进对晶状体赤道的感应以及通过囊抛光技术在瞳孔和赤道区域完成晶状体材料清洁来减少 PCO。
传感缺陷也会增加后囊破裂的风险,这是在核乳化、皮质去除和囊抛光过程中发生的最常见的并发症。囊袋(包括后囊)是一种不易察觉的脆弱组织,厚度约为10µm。当靠近包膜时,可能会因抽吸水平不适当或超声乳化或冲洗/抽吸工具的操作不准确而发生后囊膜破裂。通过结合高分辨率眼内 OCT 成像和高精度机器人操作,后囊的整体定位,从后极到晶状体赤道,可用于安全引导手术器械进行白内障摘除,从而降低白内障风险后囊破裂。此外,OCT 反馈和准确的眼内操作还可以实现精确的 OCT 引导的人工晶状体植入。
2.眼底GCT治疗
眼内机器人系统的潜在未来应用包括基因和干细胞治疗,这些治疗目前是严重的视网膜疾病的前沿治疗方向。为了实现给药,需要在玻璃体或视网膜下空间中进行准确和长时间的注射,而传统的玻璃体内给药技术并不理想。几项关于视网膜下应用的研究已经在没有机器人辅助的情况下进行,并在治疗年龄相关性黄斑变性、斯塔加特病和无脉络膜症等疾病方面取得了可喜的成果。然而,与传统的玻璃体内给药技术相比,视网膜下注射与手术并发症的增加有关,例如玻璃体出血、视网膜脱离和术后脉络膜新生血管的发展。由于这些原因,必须进一步研究药物输送方法以提供安全有效的治疗选择。手术机器人系统预计将具有对正确给药至关重要的精度和准确性。
3.RVO 治疗
眼内手术机器人系统的另一个潜在未来应用可能涉及 RVO 治疗。
RVO 是视网膜静脉硬化和血栓形成,是比较常见的眼底血管病,可通过黄斑水肿、青光眼或玻璃体出血导致视力丧失,并影响约 2% 的人群。一种潜在的治疗方法是视网膜静脉插管。在这种技术中,通过微量移液器对堵塞的静脉进行插管,并将抗凝剂注入管腔以溶解凝块。抗凝剂必须长时间连续注射,手术工具必须在静脉内保持稳定。人手震颤范围已超出视网膜静脉直径。因此,运动稳定性和准确定位要求导致手术对于人类外科医生来说非常难以成功执行,但对于机器人系统则不然。
迄今为止,成功的机器人辅助静脉插管已在动物模型和人类患者中得到证实,但尚未作为安全有效的治疗选择得到广泛验证。
RVO其病理特征是:视网膜血液瘀滞、静脉迂曲扩张、视网膜出血和水肿。RVO可分为视网膜中央静脉阻塞(CRVO)及视网膜静脉分支阻塞(BRVO)。
RVO是仅次于糖尿病视网膜病变的第二大导致老年人视力损伤的视网膜疾病,40岁以上人群患病率为0.3%~1.9% 。
RVO一般发现较为晚期,患者因临床症状严重去医院求医的时候已经是重症,往往发现有新生血管、增殖性病变、炎症因子浸润,这已经是终末期病理变现,是机体对缺血或无灌注领域的代偿性增生,为RVO并发症黄斑水肿的损害表现。临床上通常采用抗VEGF、光凝、抗炎等作为一线治疗。这的确是治疗现状。
但逻辑是治疗由RVO引起的并发症损伤,而不是直接解决静脉栓塞。之所以有这样的治疗逻辑,是因为临床上医生发现:视网膜静脉阻塞治疗是一个逐步的进化过程,从最早的静脉阻塞被理解为血管堵塞就应疏通血管,因此会进行输液,比如输一些扩血管的药物,甚至抗凝抗血栓的药物,但其治疗效果并不理想。
从直接解决栓塞的逻辑出发,小编认为对手术机器人的临床需求还是存在的。如果能通过高精的手术机器人,在塌陷的静脉插管操作RVC注射溶栓剂,通过辅助路径实现,这是临床医生乐见的,也可作为适应症的解决方案之一。目前现有的临床治疗方案是基于现有的技术存在。有临床医生认为BRVO主要在于处理静脉阻塞的转归而非解决阻塞本身,一般预后较好,小编也和医生朋友进行过讨论,认为CRVO往往较为严重,血管也相对较粗,是手术机器人相较于BRVO可以介入的RVO类型(欢迎临床医生一起讨论)。
视网膜静脉插管 (RVC) 是一种正在研究当中的潜在外科手术,通过将治疗剂直接输送到栓塞部位来治疗 RVO。该过程包括三个主要步骤:(1) 准确地将尖端的插管插入阻塞的视网膜静脉;(2) 刺穿静脉壁并将插管尖端精确地停在正确的深度;(3) 将插管保持在视网膜静脉内。静脉注射几分钟,在此期间,治疗剂目前是组织纤溶酶原激活剂 (t-PA) 或 ocriplasmin,以溶解阻塞的血栓。
这是一个非常高风险的手术,因为视网膜静脉体积小且脆弱,特别是如果阻塞位于视网膜分支静脉(通常 Ø < 200 μm) 。目前全球多家公司在动物模型眼、人眼中使用眼科手术人机器人进行视网膜静脉插管,展示了该技术在临床应用的可行性基础。
附一项视网膜静脉阻塞的血小板和血栓形成相关危险因素的研究[5]:
视网膜静脉阻塞 (RVO) 是一种异质性疾病,其中血栓的形成导致视网膜静脉系统变窄并阻碍视网膜循环的静脉回流。RVO的发病机制尚不明确,但被认为是多因素的,取决于局部和全身因素,可分为血管因素、血小板因素和高凝因素。血管因素包括血脂异常、高血压和糖尿病。关于血小板因素,血小板功能、平均血小板体积(MPV)、血小板分布宽度(PDW)和血小板大细胞比(PLCR)在视网膜静脉阻塞的诊断中起关键作用,应予以监测。高凝状态在视网膜静脉阻塞中的作用机制仍不清楚,需要进一步研究。根据Virchow的三联征,上述所有因素都会导致血栓形成,从而导致眼底静脉血管发生病理生理变化,进而导致血管闭塞。因此,视网膜静脉阻塞的诊断应基于眼科检查和全身检查。

另附一项关于亚洲人群RVO流行病学数据[6]:
一新加坡科研团队为了“描述多种族亚洲人群中视网膜静脉阻塞 (RVO) 的患病率及其危险因素“在2016年《Ophthalmic Epidemiology》发表的了一项关于《多种族亚洲人群的视网膜静脉阻塞:新加坡眼病流行病学研究》的研究。研究显示:在新加坡40-80 岁的多种族亚洲人口中,RVO 的总体粗略患病率为 0.72%。RVO 的粗略患病率在中国、印度和马来人参与者中相似( p = 0.865)。在多变量回归模型中,RVO 的显著危险因素包括年龄增加,高血压,血清肌酐升高,心脏病发作史和总胆固醇增加。据估计,到 2020 年和 2040 年,RVO 将分别影响亚洲多达 1600和2100 万人。
针对RVO的解决方案,目前除了药物,设备类产业切入口还可以有两个思路:
诊断设备:早发现早治疗,开发早期发现RVO病理生化的诊断技术,包括全身(血液系统)和眼科,尤其是眼科,如一些更早期、更精准的影像设备、超声诊断技术、液体活检技术等等;
辅助手术设备:在明确的手术指征下,比如并发症出现早期或之前,或者溶栓方案预期对疾病转归收益较大,可以直接解决RVO血管栓塞,即通过手术机器人辅助操作。
05未来发展趋势
在不久的将来,眼内机器人系统的方向是改进特定和常规任务的可视化和机器人辅助。可以想象,这些任务可以完全或部分自动化,并由人类操作员或外科医生独立执行。这些成就只能通过改进来自 OCT 的反馈或与机器人系统紧密集成并准确注册的其他图像模式来实现。同样,我们设想具有沉浸式增强现实驾驶舱的手术系统,并配备多感官反馈。这种集成的增强现实视觉显示器可以提高执行完整眼内手术的安全性和有效性。这在复杂的视网膜手术病例中可能特别有益,例如在准确的情况下解剖严重的视网膜前组织,双手操作是必要的,但受限于电流感应能力和双手操作的难度。在遥远的未来,可以想象由人工智能引导的眼内机器人系统甚至可以拥有在没有人类外科医生任何输入的情况下做出手术决策的能力。
参考:
[1]https://link.springer.com/chapter/10.1007/978-3-319-47226-3_14
[2]https://www.ophthorobotics.com/product-en.html
[3]https://euroeyes.com/robotic-eye-surgery-an-overview/
[4]Pitcher et al., J Comput Sci Syst Biol 2012, S3; DOI: 10.4172/jcsb.S3-001
[5]https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5441978/
[6]https://www.nature.com/articles/s41433-020-0837-9
[7]https://www.sciencedirect.com/science/article/pii/B9780128142455000360
[8]http://robot.sia.cn/CN/10.13973/j.cnki.robot.200040
[9]http://robot.sia.cn/CN/10.3724/SP.J.1218.2014.00293
[10]Surgical robots types, advantages, disadvantages, How is robotic surgery different from traditional BY HEBA SOFFAR· PUBLISHED APRIL 19, 2022 · UPDATED APRIL 22, 2022
[11]https://www.preceyes.nl/
[12]https://doi.org/10.1016/j.mechmachtheory.2021.104568
[13]DOI:10.3901/JME.2013.01.015
[14]DOI:10.13973/j.cnki.robot.180292

来源:钱塘壹创科转杂谈


