导 语
近日,美国北卡罗来纳大学教堂山分校和范德比尔特大学研究人员合作,研制出了一款能穿越活体肺组织的极其柔韧但坚固的机器人,相关研究发表在《Science Robotics》期刊上。
1、研究背景
肺癌是癌症相关死亡的主要原因。有些隐藏在肺组织深处的肿瘤非常小,使得医生难以触及它们。为应对这一挑战,美国北卡罗来纳大学教堂山分校和范德比尔特大学研究人员一直在研究一种能穿越肺组织的极其柔韧但坚固的机器人。他们在《Science Robotics》期刊上最新发表的论文中,展现了机器人可自主地从“A点”出发到达“B点”,同时避开微小气道和血管等活体实验室模型中的重要结构。
研究人员Akulian博士强调,这项技术能够达到机器人支气管镜无法达到的目标,对于医生追踪肺部的小目标有很大帮助。
2、研究概述
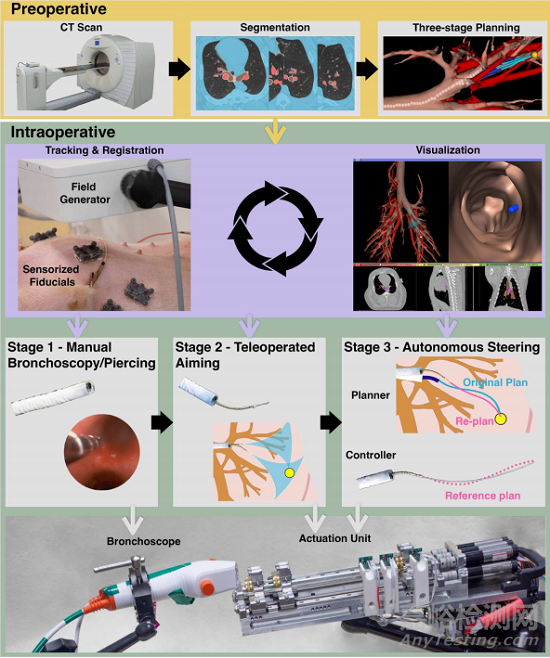
该半自主导向针系统由三个阶段组成,每个阶段都直接对应于医疗程序的一部分。第一阶段由医生手动引导传统支气管镜通过气道。第二阶段为医生远程操作瞄准装置。第三阶段包括在考虑呼吸运动和避免解剖学障碍(如临床相关的脉管系统、支气管和内脏胸膜边界)的情况下,通过薄壁组织到达结节的自主针头部署。
三个阶段的控制方法-手动,远程操作和自主-利用了人类和机器人的各自优势:支气管镜导航依赖于医生现有的专业知识;远程操作瞄准装置是手动控制和机器人自动化之间的桥梁;最后一个阶段是利用机器人的能力自主操纵可操纵指针准确地到达目标。
半自主医疗机器人在肺部的三个阶段(图片来自论文)
该研究设计的系统能够准确地获得临床相关的肺结节。手术流程包括创建患者的解剖几何模型,通过运动规划来规划三个阶段中的每个阶段的任务部署,最后通过手动控制、远程操作和自动化执行计划。
集成软件和硬件组件的工作流程(图片来自论文)
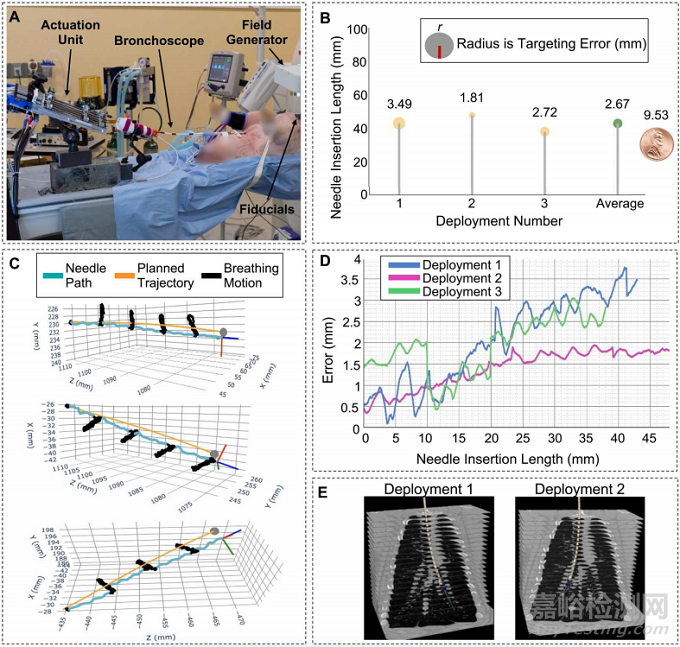
由于体内环境和离体环境在呼吸运动、医疗风险以及手术过程中不确定性之间的差异,离体针头引导实验不足以表明临床可行性。于是研究人员利用猪模型在现实环境中评估了系统的性能,并通过猪体内实验证明了其临床潜力。值得注意的是,在所有的手术过程中,自动操纵针都没有与任何解剖障碍发生碰撞,实验中没有出现气胸、肺不张、血管穿孔和出血等不良事件。
猪体内实验结果(图片来自论文)
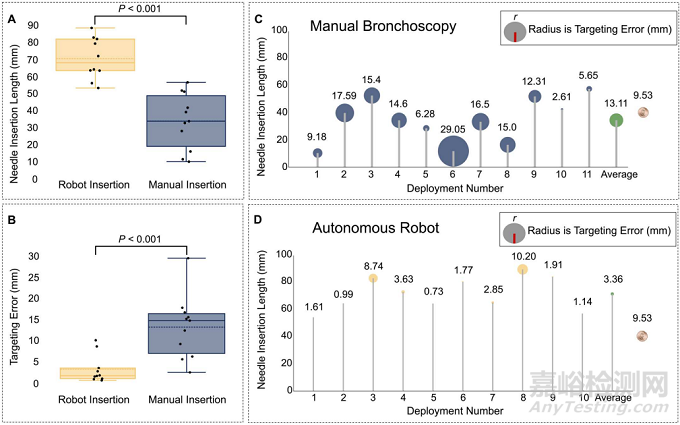
为了评估系统在改善难以到达的外周目标方面的能力,研究人员在离体猪肺中进行了一项研究,将该系统与现代诊断支气管镜技术进行了比较。
实验结果表明,使用机器人系统时的平均针头长度比临床支气管镜检查时的平均针头长度长(分别为 70.75 ± 11.49 mm 和 34.23 ± 15.44 mm , P = 0.000013),且机器人的瞄准误差明显低于临床支气管镜检查(分别为3.36 ± 3.18 mm 和 13.11 ± 6.91 mm , P = 0.0009),即该研究系统能够以高精度到达肺的外周薄壁组织内的目标。
人工支气管镜检查与机器人系统的对比实验结果(图片来自论文)
猪体内实验和比较研究证明了该半自主系统的临床可行性,在安全准确地到达肺的外周薄壁组织内的目标方面,该系统优于现代临床方法。
3、研究意义
该项研究表明了可操纵针头机器人的临床潜力,使医生能够在避开障碍物的同时安全地进入活体软组织区域。自主可操纵针头机器人的发展可以在许多介入性医疗程序中发挥作用,对于活组织检查、定向给药、消融和局部放射癌症治疗等具有重要意义。
内容来源:https://www.sciencedaily.com/releases/2023/09/230921105658.htm
参考文献:
Alan Kuntz, Maxwell Emerson, Tayfun Efe Ertop, Inbar Fried, Mengyu Fu, Janine Hoelscher, Margaret Rox, Jason Akulian, Erin A. Gillaspie, Yueh Z. Lee, Fabien Maldonado, Robert J. Webster, Ron Alterovitz. Autonomous medical needle steering in vivo. Science Robotics, 2023; 8 (82)