导 语
近日,中国科技大学进行的一项研究:具有闭环精细运动技能的便携式软体康复手套,可以帮助中风后手部功能受损的人实现单一和复杂的精细运动技能康复练习,并完成一些日常生活活动。这一研究成果发表在国际学术期刊《Nature machine intelligence》上。
1、研究背景
每年,全球有超过700万新增患者因中风而出现手部残疾。因神经通路受损,他们失去手部精细运动技能(fine motor skills, FMSs)。神经可塑性理论表明,通过重复的手部运动练习可以帮助他们重新建立调节手部功能的神经通路。因此,患者通常会在医院接受专业治疗师的强化康复训练。但传统的康复治疗往往会给患者带来沉重的经济负担,且当前治疗师数量不足以满足如此庞大患者人群的康复治疗需求。
近年来,帮助患者进行康复训练的机器人辅助技术迅速发展,然而现有的康复手套在实现精细运动技能方面仍然面临着巨大挑战。大多数手套不能够直接捕捉受损手指的变形情况,且它们在手指的弯曲过程中无法实现闭环控制,尤其在协调多个手指完成复杂的精细运动技能的时候。
2、研究概述
该研究团队设计了一种便携式软体康复手套,能够实现具有实时感觉反馈和闭环控制系统的多种精细运动技能。这种手套仅重0.49公斤,具有紧凑、便携和低噪音的优点,为患者在各种环境中的重复康复训练提供了更多的机会,且已经验证该手套可以帮助患者完成精细运动技能。
图1:a)软手套的分解图。通过选择性地加热SMA 弹簧致动器,弯曲电缆和压平电缆分别拉动手指进行弯曲和压平。电路板和 HMI 面板集成在一起,便于控制和交互。五对电机开关用于选择性地冷却指定的 SMA。b)软手套手部的后视图。弯曲电缆穿过带子的小孔并连接到指尖。指尖预留了一个孔,用于保证触摸灵敏度。(图片来自原文)
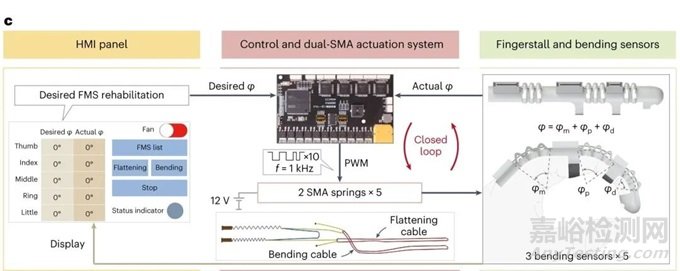
此手套由三个主要模块组成:可触摸的人机界面面板(human–machine interface, HMI) 、控制与驱动系统以及带有弯曲传感器的仿生指套。人机界面面板可输入所需精细运动技能康复命令以及显示手指的实际状态。控制与驱动系统通过形状记忆合金(shape-memory-alloy)弹簧来实现康复命令。带有弯曲传感器的仿生指套可以精确感测每个手指的三个关节角度,并反馈到控制系统以闭环方式驱动形状记忆合金。
图2:c)软手套的工作原理,其中所需的 FMS 康复命令被发送给 HMI,由控制电路处理并由 SMA 弹簧致动器执行以使目标手指变形。通过三个弯曲传感器测量手指的实际弯曲角度(记为φ ) ,然后馈送到电路板进行闭环控制,同时实时显示在 HMI 面板上。(图片来自原文)
中风后手部功能缺失患者使用定制软体手套时,手指实际弯曲角度与所需角度非常吻合,只存在较小偏差。该偏差是由于中风后个体在康复锻炼过程中出现无法控制的肌肉反应造成的,但此种偏差通常在两秒内就会通过闭环控制系统被消除。
图3:a)六种单模 FMS 的图示:拇指对位、尖端捏捏、三脚架捏捏、圆柱形捏捏、横向捏捏和拳头。所涉及手指的弯曲角度在手势附近提供,箭头表示运动方向。b,代表性开关模式FMS:尖端捏紧到横向到尖端捏紧以及五个手指的相应控制方案。c – h,六种单模式 FMS 康复中所需弯曲角度与实际弯曲角度的比较:拇指对位 ( c )、尖端捏捏 ( d )、三脚架捏捏 ( e )、圆柱捏捏 ( f )、横向捏捏 ( g ) 和拳头(h)。i,从尖端捏捏到横向捏捏到尖端捏捏的代表性开关模式 FMS 康复。实线表示相关手指的实际弯曲角度,棕色虚线表示相应的所需弯曲角度。(图片来自原文)
3、研究意义与讨论
此研究部分填补了现有康复手套缺乏手指运动感应和闭环控制算法的空白,将传感、驱动、人机界面、能源和闭环算法紧密集成。这款康复手套可以让中风后的患者以更舒适方便的方式恢复手指的精细运动技能。对于肌肉无力或硬度较低的患者,这款手套帮助他们高精度地完成精细运动技能康复,有利于重建正确的神经通路。然而,对于肌肉强直的患者而言,形状记忆合金弹簧的力量可能不足以让他们的手指变形,且缺乏全面数据来验证此款手套的长期康复效果。
参考文献:Sui, M., Ouyang, Y., Jin, H. et al. A soft-packaged and portable rehabilitation glove capable of closed-loop fine motor skills. Nat Mach Intell 5, 1149–1160 (2023). https://doi.org/10.1038/s42256-023-00728-z