导 语
近日,马塞诸萨州波士顿大学的Jacob Rogatinsky和他的同事设计了一个可以进入心室的毫米级机器人,以及应用于上腔静脉的稳定装置。该成果发表于《Science Advances》。
1、研究背景
随着微创手术技术的成熟,机器人已经相当普遍地应用于临床手术中,手术机器人可以增强操作者的能力,并使某些不可行的手术成为可能。手术机器人平台在各领域都具有优势,例如在心血管干预(心脏标测中的精确定位、射频消融和瓣膜修复)、骨科手术(髋关节置换术)等领域。
心血管疾病是全世界死亡的主要原因,心律失常、瓣膜疾病、冠状动脉疾病和心力衰竭都属于心血管疾病的范畴。为了应对日益增加的心血管疾病负担,临床医生开发了经导管进行干预的方法,无需进行可能会导致继发性器官灌注不良和损伤等并发症的心脏直视手术和体外循环。然而这种方法当前面对一系列挑战:脉管系统和心室之间的尺寸差异;心肌收缩导致的工作空间位移;如何通过工具操作远处的经皮进入部位。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
研究人员开发出一种用于心脏内部的多功能软性机器人导管,能够应对现有挑战。该机器人由毫米级可展开机构组成,体积足够小,可以通过脉管系统进入心脏,但其扩展和利用更大心脏空间的能力允许在运动环境和远程操作的情况下稳定心脏附近的脉管系统,使操作者可以主动操纵心脏内的器械并保持稳定性、灵活性并提供足够力量输出。
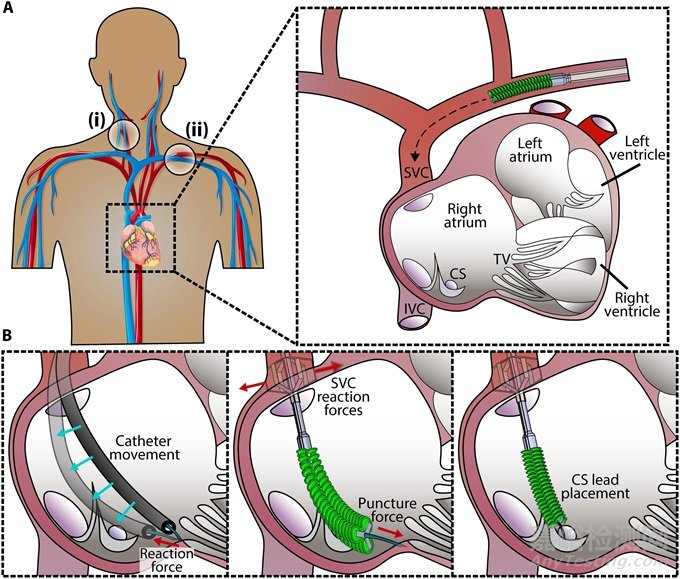
图1:设备应用的临床工作流程演示
A) 该装置通过上腔静脉通过两个外周进入部位之一朝右心房移动:(i) 右颈内静脉或 (ii) 左锁骨下静脉。B) 左图:说明传统导管当前面临的挑战,其灵活性使得施加力和精确控制位置非常困难。中:所提出的装置可以靠上腔静脉自我稳定,以最大限度地减少远端力损失。这种稳定性以及软机器人尖端使用户能够执行三尖瓣环形锚植入和冠状窦起搏器引线放置等手术。图示机器人将锚部署到三尖瓣环中。右图:机器人将导丝引导至冠状窦。(图片来自原文)
具体来说,机器人平台具有一个稳定组件,该组件将半刚性和柔性材料结合成一个结构,该结构可在心脏的静脉入口处扩展和支撑。它的设计目的是为主动转向组件提供杠杆作用,同时最大限度地减少生理压力,例如通路血管中的血压梯度和血管损伤。主动转向组件完全由软材料组成,允许用于驱动的流体及其组成材料的灵活性来提供对外力的阻尼。对其运动学进行了编程,允许用户在心内工作空间的任何点定位介入工具。
图2:集成机器人平台概述
A) 该设备工作流程分为六步:(i) 用户使用 Nintendo Wii Classic 控制器控制软机器人的流体室。(ii) 用户输入由 Arduino Leonardo 微控制器解释。(iii) 微控制器向三个线性电机(Actuonix,S20)发送信号,驱动各自的注水注射器。(iv) 用户通过拉动注射器柱塞来部署稳定机构,这会在鲍登缆线中产生张力。(v) 作为步骤 (iv) 的结果,稳定机构针对上腔静脉 (SVC) 展开。(vi)通过步骤(i)至(iii)来控制软机器人。B) 软机器人组件能够径向收缩至 8 毫米的设备直径,使其在穿过脉管系统时能够穿过管腔。此外,用于稳定机构的鲍登电缆的末端穿过鲁尔锁阀并进入注射器,使用户在拉动电缆后锁定稳定装置。(图片来自原文)
3、研究意义
体外和离体测试表明,该机器人平台能够解决心脏跳动干预的三个关键挑战。从临床角度来说,该平台可以应用于有着不同工具要求的一系列手术。在临床之外,该平台为软体机器人在心脏内直接操作任务开辟了一条道路。临床前离体研究旨在尽可能接近地模拟活体动物测试,但未来的体内测试将有必要将该技术推向临床转化。
参考文献:Jacob Rogatinsky et al.,A multifunctional soft robot for cardiac interventions.Sci. Adv.9,eadi5559(2023).DOI:10.1126/sciadv.adi5559