导 语
近日瑞士洛桑联邦理工学院生物机器人实验室团队提出了一种利用足部触觉界面控制两个额外机器人手臂的方法,使得一名手术医生可以在双手双脚的配合下,同时操作四个腹腔镜工具,在独立完成手术的同时,降低任务负荷,提升流畅度。相关研究成果发表在《The International Journal of Robotics Research》期刊上。
1、研究背景
在许多外科手术场景中,仅使用双手不足以控制所有工具,因此需要助手辅助医生同步操作,这需要两人之间努力保持同步,协调运动,并预测彼此的需求。然而这种合作仅仅依靠口头暗示,会降低操作的流畅性,还可能导致配合失误。如今随着辅助机械手和可穿戴外肢体的发展,人机协作可提升人并行多任务操作的能力,有助于实现一人控制多种手术工具。然而,在上述场景中,如何实现自然、流畅的交互仍然是一个悬而未决的问题。
现有研究表明:1)足部界面可以作为一种有效的替代输入方式,可用于控制机器人臂或其他辅助设备,同时不干扰人双侧上肢的固有运动;2)与常见的直接控制方式相比,共享控制策略可以在提高机器人手术的安全性和效率的同时,提升用户的舒适度,降低负荷。
本文提出了一种利用足部触觉界面控制两个机器人助手的方法,包含两种共享控制辅助模式:1)用于摄像头导航的自适应视觉跟踪;2)用于抓取物体的操作辅助,重点讨论了上述共享策略的有效性及对减少操作者任务负荷和简化四臂任务的影响。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
1. 四臂系统
该研究首先构建了一个具有触觉反馈的四臂腹腔镜手术系统,该系统使用两个足部界面来控制两个机器人臂,每个臂有五个自由度,一个臂控制一个摄像头,另一个臂控制一个带有电动夹子的腹腔镜工具,如图1所示。该系统使用二次规划求解器来解决机器人臂的逆运动学问题,同时考虑了腹腔镜手术、多臂控制和人机协作的任务和安全约束,如远端运动中心、工作空间限制、臂间和人机碰撞控制等,以实现碰撞感知,保证人机安全。系统使用动态系统框架来生成手术工具尖端的期望动力学,包括线性速度和角速度。动力学由人的输入(即脚的姿态)和工具的类型(摄像头或夹具)决定,并考虑了滑轮效应和物理人机交互。
除此之外,该系统还包括足部触觉界面,可以为操作者提供触觉反馈,包括抓取反馈、可变阻抗反馈和引导反馈,以增强操作感知和控制精度。本文创新地提出了两种机器人辅助模式,分别是自适应视觉跟踪辅助和抓取辅助。自适应视觉跟踪针对摄像头的导航,通过图像处理和机器学习的方法,实现对腹腔镜工具的自动识别和跟踪,从而减轻医生的足部操作负担。抓取辅助是针对夹具的操作,通过力传感器和电机的控制,实现对物体的自动抓取和释放,从而简化医生的足部控制操作。
图1:四臂腹腔镜手术系统。
术者保持坐位,使用双手进行常规腹腔镜检查,同时双脚远程操作两个辅助机械臂执行机器人手术任务。
(图片来自原文)
2. 用户验证评估
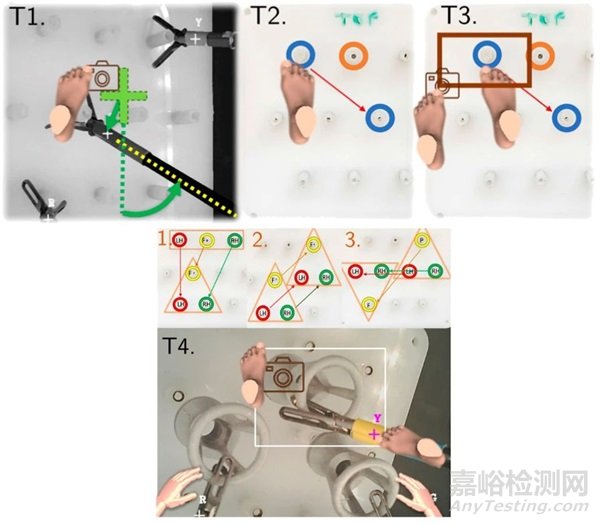
该研究对十二名受试者进行了实验,评估了系统的易用性和所提出的共享控制策略的有效性。共设计了四种不同难度的腹腔镜手术任务,如图2所示,难度由低到高分别为单脚视觉追踪(T1)、单脚工具操作(T2)、同时包括相机追踪和工具操作的双足任务(T3)、以及同时包括相机追踪和三臂操作的四臂任务(T4)。被试分别在无共享辅助策略(W.O.)和有共享辅助策略(W.GA.CA)的情况下执行上述任务。为了研究辅助方式在不同任务中的效果,定义了主观和客观指标。主观指标包括针对每个任务条件填写的机器人使用感知问卷和任务负荷指数问卷。客观指标包括完成时间、成功率、失败次数等。
图2:不同难度的腹腔镜手术任务。
T1:视觉追踪任务;T2:单足操作任务;T3:双足任务,包括视觉任务和操作任务;T4:四臂任务,包括视觉任务和三臂操作任务。
(图片来自原文)
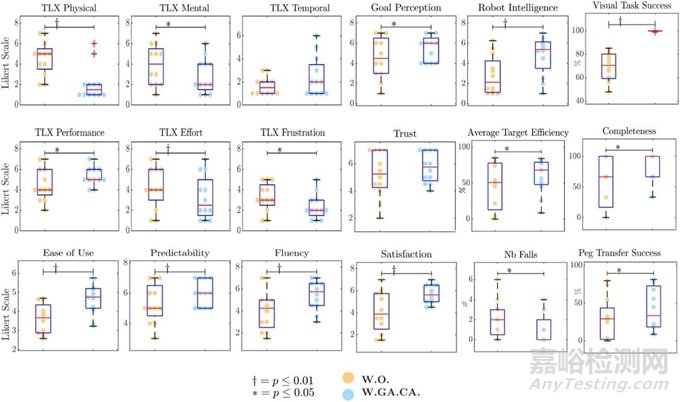
主要结果如下:1)共享控制对四手任务中的作用(如图3所示)。联合使用抓取和视觉辅助显著改善了绝大多数客观指标,包括平均目标效率和任务完成度显著提升,失败次数显著下降;在四手任务中视觉任务和工作操作任务的成功率同样显著提升。在主观指标中也获得了类似的影响,在任务负荷方面,使用这两种辅助模式显著改善了定位和抓取动作的心理需求、努力、挫折和表现。在使用感知方面还显著提高了流畅度指数。
图3:工具共享控制对四手任务(T4)主观和客观度量的影响
(图片来自原文)
2)不同控制条件下的任务目标精度和完成时间(如图4所示)。单脚视觉追踪任务(T1)的平均位置误差为(17.19 ± 10.51)px,角度误差为(4.35 ± 1.90)°,任务完成时间为(22.72 ± 6.17)s。涉及操作的任务的中位目标时间为:T2: 42.11s, T3: 56.39s, T4: 82.26s,当没有提供辅助时,中位目标时间为:T2: 40.20s, T3: 46.22s, T4: 68.63s。作为参考,手控腹腔镜手术培训时,相同的操作任务的最大允许时间为50 s。这意味着在共享控制下,参与者在单足和双足控制模式下可满足腹腔镜手术标准限度进行脚操作,但在四手情况下尚不满足标准。
图4:任务目标精度和完成时间
(图片来自原文)
3、研究意义
本文提出了一种利用足部触觉界面控制两个机器人助手的方法,使得一名手术医生可以同时操作四个腹腔镜工具,同时配以视觉追踪辅助和抓握辅助两种共享控制模式,可有效降低使用者任务负荷,提高性能,增加任务流畅性。本文证明了在单足、双足和四臂设置下,使用脚实现包括工具操作和目标寻找或跟随的标准腹腔镜训练任务的可行性和系统的易习得性。本研究为未来提出新的手术方式、提高医院的手术吞吐量从而提升医院效率提供了可能性。
参考文献:Hernandez Sanchez J, Amanhoud W, Billard A, et al. Enabling four-arm laparoscopic surgery by controlling two robotic assistants via haptic foot interfaces[J]. The International Journal of Robotics Research, 2023: 02783649231180366. DOI10.1177/02783649231180366