导 语
北京科技大学研究团队最近进行了一项试点研究,提出了一种创新的可变刚度气动致动器,增强了外骨骼驱动器的弹性。该技术的研发旨在解决当前软机器人手套多用于协助手指屈曲的局限性,对于因中风后肌肉紧张而无法伸展手指的患者提供了有效的解决方案。相关研究成果已在《IEEE ROBOTICS AND AUTOMATION LETTERS》上发表。
1、研究背景
手在日常生活中扮演着关键角色,但中风常导致功能障碍。传统康复方法繁重昂贵,手部康复机器人应运而生,但存在关节对准和重量问题。柔软机器人手套备受关注,其中气动致动器是研究焦点。然而,现有致动器难以满足紧张肌肉患者的需求。研究团队提出了一种新型气动致动器,利用多级铰接弹性体和纤维增强致动器。该致动器通过调节真空压力适应不同肌肉紧张和康复阶段。设计集成在柔软机器人手套中,可协助进行康复手势和抓握任务。研究通过人工手模型验证了延展效果,受试者的可穿戴评估展示了其在康复和日常任务中的潜力。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
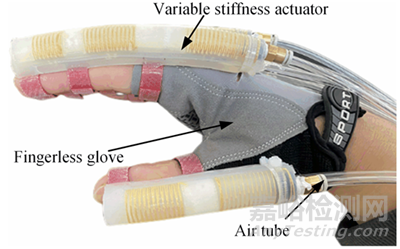
变刚度执行器作为软式机器人手套的关键组成部分,其结构设计直接影响到设备的性能。本论文介绍了变刚度致动器的设计,包括变刚度执行机构的结构图、手指上的松散可变刚度室嵌入的纤维增强软致动器(MSAE),以及MSAE在真空压力下提供高弹性的原理。
图1:变刚度软体机器人手套
(图片来自原文)
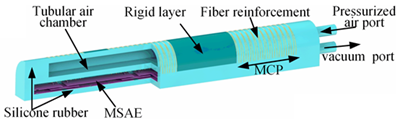
变刚度致动器的结构设计考虑到手的运动学,具体而言,它由纤维增强软致动器和变刚度部分组成(见图2)。纤维增强物与手指的三个关节相对应,而两个刚性层则分别对应中间和近端指骨。在空气压缩进入纤维增强致动器时,发生弯曲运动。可变刚度部分包含嵌入在可变刚度室中的多级铰接弹性体MSAE,其结构由三层弹簧钢板通过绳索铰接而成。这些层次中,中间层与手指的三个指节相对应。MSAE的设计允许其在真空压力下自由地达到致动器的弯曲角度,无需施加额外的压力。
图2:执行机构结构图
(图片来自原文)
MSAE的工作模式包括低刚度模式和高刚度模式如图3所示。在低刚度模式下,MSAE处于松散状态,跟随手指运动并不限制关节。这种模式适用于肌肉力量减弱或肌肉张力低的患者。另一方面,在高刚度模式下,通过施加真空压力,MSAE紧密贴合,提高整体致动器的恢复力。这种模式更适用于肌肉紧张度较高的患者,并可以通过调整真空压力以适应不同康复阶段的需要。
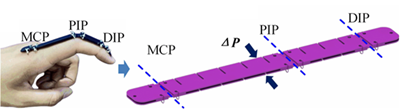
图3:位于手指上的MSAE
(图片来自原文)
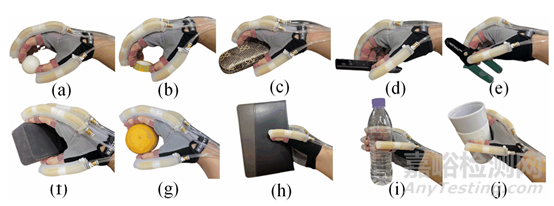
康复手势测试如图4所示。设计的康复手套展现出了卓越的灵活性,能够有效地支持典型的手势。该手套使用户能够执行广泛的手指运动,成功完成繁琐的手指捏动作,从而证明其在康复训练中具有显著效果。
图4:典型康复手势
(图片来自原文)
同时,研究团队选择了日常生活中的物体进行抓握测试,具体情况如图5所示。通过这些测试,研究者观察到该软质机器人手套能够灵活适应各种大小和形状的物体。其出色的适应性和表面附着力为用户提供了有效的支持,使其能够更加轻松地进行日常活动。
图5:软体机器人手套进行抓握测试
(图片来自原文)
3、研究意义
本研究介绍了一种基于纤维增强软致动器和多级铰接弹性体的可变刚度致动器,旨在辅助中风患者握紧拳头后手部的伸展。通过调整真空压力,该致动器的刚度可适应不同病情水平。研究团队开发了分析模型,量化了致动器的弯曲特性,并通过物理实验和有限元模拟进行验证。测试结果显示致动器在任何初始状态下都能保持稳定的输出力。对整个致动器和单个关节进行的刚度调谐性能测试表明,致动器实现了2.4倍的刚度变化,并将实验结果与理论模型进行了比较。在单个关节测试中,致动器在关节阻力为6N时的变形阻力随真空压力增加而增加,证明增加真空压力和弹簧钢片厚度可以提高致动器刚度,有利于手指伸展。研究还展示了可变刚度致动器在人工手模型上促进手指伸展的能力。最后,五个致动器集成的康复手套通过康复手势和抓握测试,满足了日常手部康复训练的需求。
参考文献:Li X, Hao Y, Zhang J, et al. Design, Modeling and Experiments of a Variable Stiffness Soft Robotic Glove for Stroke Patients with Clenched Fist Deformity[J]. IEEE Robotics and Automation Letters, 2023. DOI:10.1109/LRA.2023.3279613