您当前的位置:检测资讯 > 行业研究
嘉峪检测网 2024-06-13 08:40
产品导读
最初,达芬奇机器人系统是由SRI(一个非营利性研究机构)开发的,后来在1985年得到了美国陆军( DARPA(国防高级研究计划局)的资金支持,目的是在战场前沿附近的高级医疗设施与外科医生相距甚远时,对受伤士兵进行远程手术。
随后,NASA也加入了该项目,进而发展成为一个更加雄心勃勃的计划,即让地球上的外科医生在太空中进行手术。十年后,由于当时的技术条件限制,该计划被认为无法实现而被终止。
曾在该项目工作的斯坦福大学的一批工程师决定创办一家初创公司,将项目方向调整为更现实的目标——实施机器人辅助腹腔镜手术。1995年,直观外科公司成立,并收购了SRI的专利组合。随后,该公司通过实施积极的市场控制策略发展起来,收购了该领域内的其他重要公司,比如Computer Motion。
1999年,达芬奇机器人首次在欧洲上市,并随着时间不断改进:2003年引入了用于持有内窥镜的第四臂。2006年,推出了S版本,提供了真正的三维视野和改善的工作体积。2009年,达芬奇Si版本增加了第二个主控台,允许两名外科医生协同工作。最后,自2014年4月起可用的Xi版本设计更为紧凑,提高了工作体积,并且四臂中的任何一臂都能连接内窥镜相机,还具备了未来与直观外科公司专有的荧光成像系统配合使用的潜力。2024年3月15日,直观外科对外宣布下一代多臂机器人系统达芬奇5获得美国食品药品监督管理局(FDA)510(k)许可。
达芬奇系统的不同版本之间存在一些差异,本文主要以目前国内主流使用和各大国产厂家对标的达芬奇前4代产品为研究对象,笔者通过深入研究达芬奇机器人产品细节和详细检索分析重点专利而对达芬奇手术机器人技术进行细致剖析,形成此文。
系统主要部分
尽管其名称普遍,但实际上达芬奇系统并非传统想象中的那样的机器人,而是一种主从式遥操作器。
本质上,它由三个主要组件组成:一个集成了四条独立臂的从站、一个供主控用的控制台,带有两条可由外科医生流畅操作的独立臂,以及一个包含电源、计算机、3D图像处理器和单极电切电路的控制单元。终端执行器工具安装在四条从臂中的三条上,其中大多数依赖于广泛申请了专利的技术,以Endowrist®品牌进行交易。第二主控控制台作为可选配置(Si®版本),从而允许双外科医生四手操作程序。
下图 达芬奇系统总体结构。从动操作器(1)、主控控制台(2)、控制单元(3)。可选地,第二个主控台(4)允许双外科医生四手操作。

从动设计
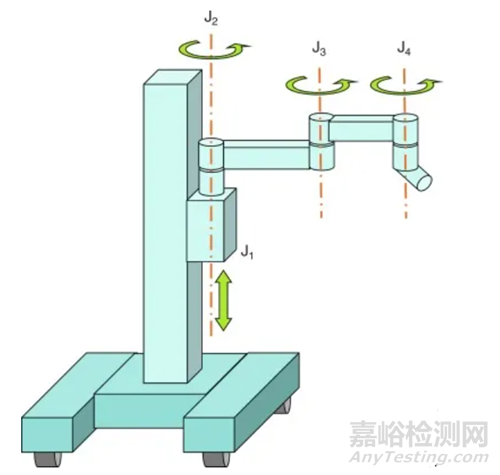
从动部分是一个庞大的结构,由四条臂组成。每条单一臂的运动学主要使用串联连杆,并依赖于远程运动中心(RCM)的概念。一个用于设定每条臂的RCM点的被动近端部分,由四个关节构成。第一个关节是棱柱形的,允许调整高度。随后是三个平面回转关节,属于SCARA类型,便于进行被动操作。棱柱关节采用电动驱动,而其他关节仅包含刹车,并配有一个按钮,在设置过程中释放刹车。
下图展示了达芬奇系统的最初4个自由度(DoF)。电动驱动的棱柱关节J1允许根据患者身高调整臂的高度。关节J2、J3、J4形成一个SCARA被动臂,并配有强力刹车,一旦臂正确就位即可锁定它们。
系统底座庞大且足够重,一旦滚轮刹车接合,整个系统即固定不动,因此无需机械固定在手术台上。系统已实现电动化,以便协助可能没有足够力量来设置系统的护士。
驱动臂
这些臂的结构可以细分为两个子单元:具有3个主动自由度(DoF)的操纵臂和末端执行器工具,根据所使用的工具,该工具还具有3个额外的DoF主动驱动功能以及一个可选的抓握功能。
操纵主动臂是长期研究的结果,结合了串联连杆与平行四边形并联结构,用于RCM。
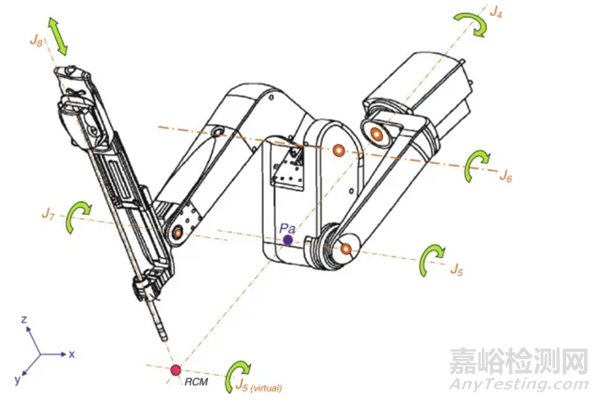
下图展示了达芬奇系统的主要结构。旋转驱动关节J4、J5共享同一轴Pa,而被动关节J6、J7的旋转复制J5的角运动到工具支架。因此,J5的作用就像位于RCM点一样。J8是一个棱柱关节,确保在RCM点为中心的平移。棱柱关节J8由多个堆叠的滑块通过缆绳和滑轮驱动。最终,达芬奇®系统主体由三个主动关节组成:工具轴向平移以及围绕患者进入点RCM的两个正交旋转。
起初,RCM是围绕刚性连杆构建的,但为了使每条臂更轻便、更紧凑,已经发展成由缆绳驱动的远程运动控制。
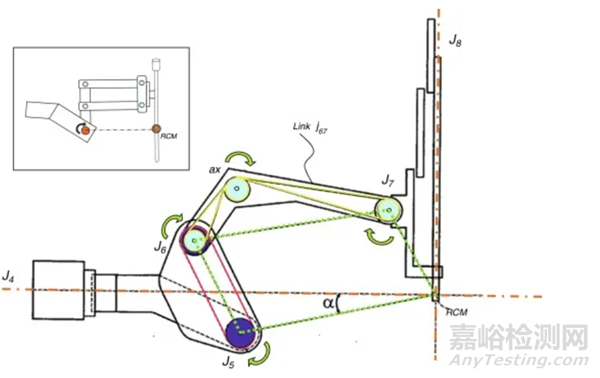
下图展示了达芬奇系统的RCM机制细节。被动关节J6通过电机驱动关节J5的缆绳(粉色)拉动。进而,J6移动连杆j67并通过缆绳(黄色)将其运动传递给J7滑轮,该滑轮连接到工具支架。这一机制使得J7能够获得与J5相同的角运动量,同时保持驱动器远离患者。整个系统如同一个角度保守的平行四边形(绿色虚线所示)。
下图展示了达芬奇臂内部的RCM机制。位于柱上的棱镜滑块和臂内的缆绳及滑轮(确保RCM运动)清晰可见。

末端执行器
这些构成了遥操作器系统的末端部分,可能是整个达芬奇系统对手术最富有想象力的贡献。它们也代表了直观外科公司专利组合中最重要的部分,拥有超过200项相关专利。
EndoWrist®包括一系列具有不同机制的器械。我们的目标仅限于对钳子进行运动学分析,这是机械上最复杂且在经口机器人手术中最重要的一项。

EndoWrist®钳子设计用于让运动系统在体内工作。这个巧妙而又复杂的概念提供了传统器械无法达到的非凡灵活性。三个自由度加上钳子开合动作,均由腱索驱动机构操作。
EndoWrist®器械有8mm和5mm输出直径两种规格,总长度为57cm,可用长度可达38cm。8mm的器械配备有万向节,而5mm的则具有更复杂的关节结构,由四个串联关节组成。
下图展示了EndoWrist®器械的内部设计。5mm的器械由于口咽腔空间有限,因此在经口机器人手术中最为常用。
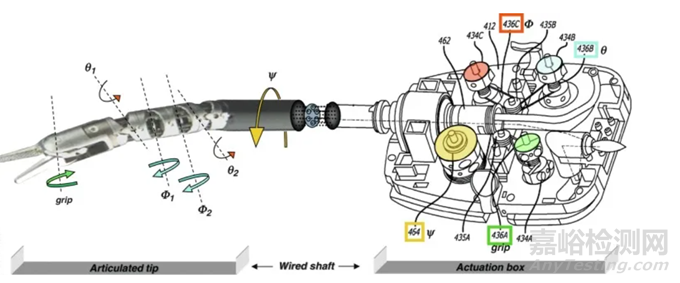
这四个“脊椎”关节尖端结构允许减小关节直径,代价是增加了长度:头尾向Φ和平行侧向θ旋转各自解耦为两个交替旋转阶段,分别为Φ1、θ1、Φ2、θ2。缆绳和滑轮被用来控制关节角度和抓取功能(钳子开合)。系统采用主动肌-拮抗肌配对控制方案,因此每个自由度需要两根驱动缆绳。因此,为了驱动头尾向和平行侧向旋转及钳子,总共需要6根缆绳。这些缆绳的路径在器械轴内,设有间隔器以避免缆绳冲突和由此产生的摩擦。第四个自由度是轴向旋转Ψ,直接在驱动盒内部操作。四个卷筒各自对应一个自由度,而张紧滑轮确保缆绳张力恒定,否则会因环境温度、磨损和重复灭菌而降低。
每个卷筒本身在EndoWrist®器械固定到操纵臂时,机械连接到旋转鼓。另一组缆绳为这些鼓提供运动,从而驱动钳子的4个自由度。
从运动学上看,这种配置属于串联类型,允许在非常有限的末端执行器占用空间下进行大范围的运动。钳子的全角度Φ和θ为±90°,而Ψ允许全360°轴向旋转,提供了非常舒适的可达性。负载能力大致相当于开放手术中常见的水平,尽管关于这一点没有准确的信息。
5mm关节器械的缺点在于其双平面脊椎连续关节的曲率半径较大,因此比万向节8mm器械需要更多空间来使其弯曲。
鉴于其复杂且因此成本高昂的制造过程以及EndoWrist®架构的相对脆弱性,制造商在这些矛盾要求之间做出了妥协。系统销售时指定使用5次或10次具体次数取决于器械后废弃。这在医疗器械史上引入了一个新概念:中等消耗品器械。控制盒中内置了一个带有热敏电阻的电子芯片,记录每次灭菌,然后破坏识别码,迫使用户在达到最大循环次数后丢弃器械。
内窥镜
这些由两个霍普金斯类型的内窥镜并排组成,带有光源通道集成在一个管内。每个内窥镜与另一个相距6mm,以满足立体视觉所需的真正视网膜差异。有两种外径可供选择:8.5mm和12mm。通常只有第一种类型用于耳鼻喉-头颈外科手术。
下图展示了达芬奇立体内窥镜。

专利事务值得关注
随着外科手术医疗器械技术领域的竞争日益加剧,专利事务已经成为企业不可或缺的一部分。做好自身的专利布局,不仅可以保护企业的创新成果,还可以为企业在市场竞争中提供有力的法律支持。
首先,企业需要注重专利的申请和保护。在研发过程中,一旦有新的技术突破或创新点,就应及时申请专利,确保自身的技术成果得到法律保护。同时,企业还需要对已有的专利进行定期维护和管理,确保其有效性和稳定性。
其次,企业需要建立完善的专利预警机制。通过定期检索和分析相关领域的专利信息,企业可以及时了解技术发展趋势和竞争对手的动态,从而避免可能的专利侵权风险。一旦发现存在侵权风险,企业应迅速采取措施进行应对,如寻求专利许可、进行技术改进或调整市场策略等。
此外,企业还需要做好应对专利战的准备。在竞争激烈的市场环境中,专利战可能随时爆发。因此,企业需要提前制定应对策略,如建立专门的法务团队、储备充足的资金用于可能的专利诉讼等。同时,企业还可以通过与合作伙伴建立专利联盟、参与行业标准制定等方式来增强自身的专利实力和市场影响力。
在手术机器人这一赛道上,专利事务的复杂性和专业性要求极高,因此,寻找专注、高水平且聚焦此领域的专业人士和团队显得尤为重要。这样的团队不仅具备深厚的法律和技术背景,还能准确理解并把握手术机器人技术的核心要点和市场动态。他们的专业知识和经验将为企业带来准确、高效、高质且低成本的专利事务服务,助力企业在激烈的市场竞争中脱颖而出。有需要欢迎扫描下方二维码添加医疗IP君取得联系。

来源:医械知识产权


