您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2024-07-04 08:42
导 语
美国麻省理工学院的研究人员开发了一种新的神经假肢接口,通过柔性电极捕获肌电信号,能够帮助截肢者自主控制仿生假肢。相关成果发表在《Nature Medicine》上。
1、研究背景
科幻小说描绘了神经控制的仿生腿,与完整的生物四肢具有相同的多功能性和反应性。不幸的是,目前的技术水平远没有那么出色。目前的仿生腿依赖于预定义的机器人控制架构来产生仿生运动,通常使用有限状态机和模式识别方法,根据步态阶段和地形类型将循环腿运动建模为离散状态。通过使用机器人传感器检测当前状态,控制器在不需要用户连续神经调节的情况下重放预定义的固有步态算法。
考虑到腿部神经力学的复杂性,当前系统的局限性并不令人惊讶。更为困难的是,在标准的截肢手术过程中,大量远端组织被丢弃,导致基本的运动外周传入神经丧失。在之前的临床研究中,利用电神经刺激提供传入反馈的被动和内在控制仿生腿已被证明可以改善步态功能。然而,当完全由人类神经系统驱动时,这种系统尚未证明仿生步态。
在该文中,研究人员评估了增加残余肌肉传入神经对膝关节以下截肢患者仿生步态神经调节的影响。他们假设,即使是少量的残余肌肉传入信号的增加,也会促进仿生步态力学、适应性和摄动反应的神经控制,而不依赖于内在的步态控制器。
2、研究概述
在该研究中,研究者招募了14名单侧小腿截肢者,其中7人接受了对侧肌腱界面(Agonist-antagonist Myoneural Interface, AMI)手术,另外7人接受了传统的非AMI截肢手术作为对照组。AMI手术的关键在于将残肢胫骨前肌(TA)和腓肠肌(GAS)以及长腓骨肌和胫骨后肌这两对屈伸肌端到端缝合,重建残肢内仿生的屈伸肌动力学,以产生与完整肢体类似的本体感受性传入。通过测量两组受试者残肢中胫骨前肌和腓肠肌的神经机械特性,研究者发现AMI组的屈伸肌传入信号比对照组平均高出18%,相当于正常水平的18%,证实了AMI手术能有效增强截肢者的残余本体感受。

神经假肢系统示意图(图片来自论文)
研究者开发了一套自主式仿生假肢系统,通过表面肌电图和柔性电极持续记录截肢者残肢胫骨前肌和腓肠肌的运动指令,实时调节假肢踝关节力矩,控制假肢完成多种步态和地形适应任务。该系统基于阻抗控制方法,将肌电信号解码为参考关节角度和阻抗调控参数,再结合假肢踝关节角度、角速度反馈,以及文献报道的生物踝关节角度和速度依赖的最大力矩特性,实时控制假肢关节力矩。值得一提的是,该控制系统完全依赖截肢者神经系统的运动调控,无需预设的机器人控制算法如有限状态机或模式识别。

仿生假肢恢复近乎自然的步态(图片来自论文)
结果显示,AMI组受试者能够在多种步速下完成近乎自然的步态,最大步行速度比对照组高出41%(1.78±0.04 vs. 1.26±0.07 m/s),与健全人快走速度相当(1.81±0.03 m/s)。同时,AMI组的假肢踝关节峰值功率和净功分别恢复了健全人65%的水平(1.95±0.11 vs. 3.0 W/kg; 0.174±0.015 vs. 0.267 J/kg),远高于对照组。AMI组假肢的生物模拟力学性能带动了患侧下肢其他关节运动的恢复,下肢运动学对称性指数比对照组高19-26%。
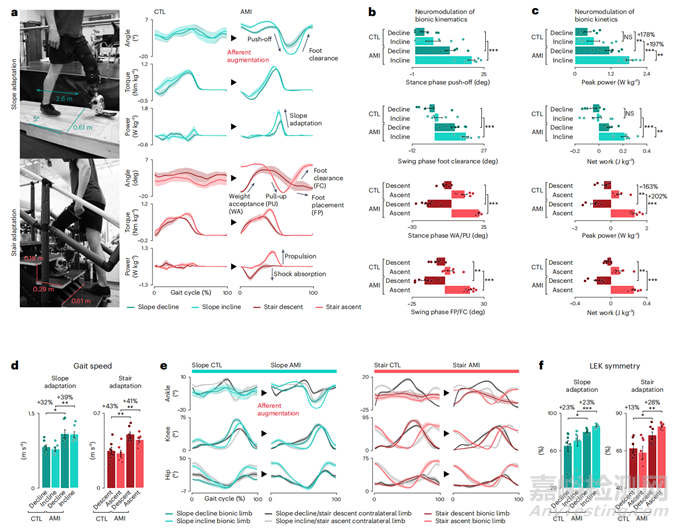
仿生假肢恢复坡面和楼梯环境下的生物模拟地形适应能力(图片来自论文)
在5°坡面和楼梯环境下,AMI组同样展现出了生物模拟的地形适应能力。他们能在不改变假肢控制参数的情况下,自主调节假肢踝关节力矩,增大上坡推进功率和净功,维持下坡时的缓冲特性;在楼梯上下时则表现出明显的初始触地缓冲和蹬离推进。与对照组相比,AMI组的地形适应性峰值功率提高了163-202%,净功提高0.12-0.232 J/kg,任务完成速度提高32-43%,下肢运动学对称性提高13-28%。
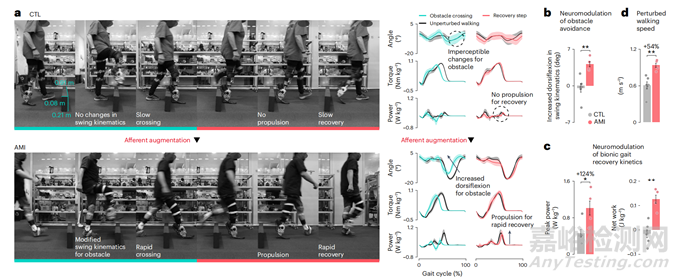
仿生假肢对障碍物扰动做出生物模拟的快速响应(图片来自论文)
此外,研究者通过障碍物跨越实验考察了AMI假肢对环境扰动的快速响应能力。结果发现,AMI组能够显著调整假肢踝关节运动,平均增加4.14°的离地背屈角度,快速跨越障碍物,并在随后的恢复步中产生124%更高的峰值推进功率(1.01 vs. 0.45 W/kg)和0.141 J/kg更大的净功,实现54%更快的扰动步行速度(0.94 vs. 0.61 m/s)。相比之下,对照组的假肢踝关节对障碍物的运动学和动力学响应能力较弱。

残肢屈伸肌传入信号增强使仿生假肢在神经调控下逐渐趋近自然步态(图片来自论文)
进一步的机理分析表明,随着残肢肌肉传入信号的增强,神经调控下的仿生假肢功能逐渐趋近于自然步态。当残余传入处于非生物模拟水平时,假肢踝关节力矩-角度曲线呈现顺时针方向,耗散步态周期内的机械能;随着残余传入增强到高水平,力矩-角度曲线转变为逆时针方向,呈现出与正常步态类似的负载响应、强力推蹬和正净功输出。相关分析表明,残肢肌肉传入信号水平与多个仿生假肢功能指标呈现显著正相关,包括踝关节峰值功率(r=0.88)、净功(r=0.78)、步行速度(r=0.85)和下肢运动学对称性(r=0.83)等,整体控制性能相关系数高达0.92。尽管AMI组的残余屈伸肌传入信号仅恢复到正常水平的18%,却能使神经控制的假肢性能趋近自然水平,表明人体具有很强的感觉运动适应能力。
3、研究意义
这项研究系统考察了残肢肌腱动力学重建对仿生假肢神经控制性能的影响,涵盖了多种步态、地形适应和环境干扰等运动任务。结果证实,通过AMI手术增强残肢本体感受性传入,可以显著提高仿生假肢在神经调控下的连续控制能力,使其在运动学、动力学和时空参数等方面接近健全人水平。这种基于神经调控而非内置机器人算法的智能假肢有望为广大截肢患者带来更自然、灵活的假肢使用体验,提高其运动功能和生活质量。该研究从残肢形态重建的角度,为未来神经假肢和人机界面技术的设计优化提供了新的思路和方法,对智能假肢和神经修复领域具有重要启示意义。
文章来源:Song, Hyungeun, et al. "Continuous neural control of a bionic limb restores biomimetic gait after amputation." Nature Medicine (2024): 1-10.

来源:Internet


