您当前的位置:检测资讯 > 行业研究
嘉峪检测网 2024-07-05 16:16
2024年7月1日,美国知名商业杂志《Forbes》(福布斯)发布了一篇文章,文章谈论了医疗手术机器人未来发展趋势以及创新点有哪些。
文章作者包括施乐辉(Smith+Nephew)的手术机器人技术专家 Bhushan Jayeshkumar Patel、福布斯技术委员会等。
前言
手术机器人,作为医疗机器人的重要子领域,融合了临床医学、生物力学、机械学、计算机科学以及微电子学等多个学科的高新技术,它的出现与应用将手术精度、手术效率、患者治疗效果的标准提升到了一个新的高度。
例如,达芬奇手术机器人系统、Versius 手术机器人系统、Monarch 手术机器人平台等,均被广泛应用。
这些系统配备了先进的成像功能、模仿人类动作的机械臂以及有助于规划和执行的复杂软件,能缩短患者康复时间,最大限度减少手术创伤并改善手术结果。
目前手术机器人技术已经在医疗领域取得了重大进展,并且仍然在快速发展。然而,手术机器人的潜力远不止于此。
随着技术的不断进步,手术机器人系统在手术室中的应用和有效性有望进一步扩大。以下是一些值得关注的创新点。
提升触觉反馈、力反馈技术
手术机器人技术面临的挑战之一是缺乏触觉反馈,包括动觉(力)和皮肤(触觉)反馈,这对于精细的手术至关重要。
触觉反馈技术
机器人辅助微创手术 (RMIS) 尚未实现广泛应用的原因之一就是受限于触觉反馈技术的不足。
触觉技术在机器人辅助微创手术中的目标是提供“透明性”,需要患者端的手术机器人上的人工触觉传感器来获取触觉信息,并通过触觉显示器将信息传达给外科医
生。
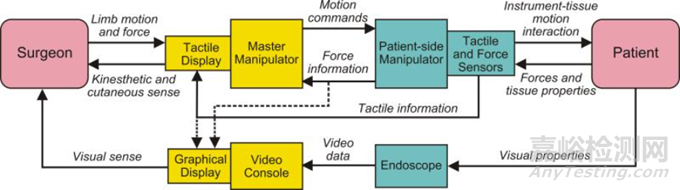
触觉技术工作原理图解
触觉包括力、分布压力、温度、振动和纹理,在某些情况下很难建模和量化,更不用说获取和显示了。
在不牺牲 RMIS 系统的操作度、灵活性的情况下,向外科医生提供大量触觉信息是一项重大的技术挑战。同时,机器人组件,特别是一次性器械,必须保持低成本和坚固耐用。
目前针对 RMIS 的触觉反馈系统仍在开发和评估中,大多数仅提供力反馈,保真度有限。
力反馈技术
RMIS 的力反馈系统通常测量或估计手术器械施加到患者的力,并通过力反馈装置向手提供解析力。
市售的力传感器对于测量许多远程操作应用中的力和扭矩非常有效,但手术环境对尺寸、几何形状、成本、生物相容性和灭菌性提出了严格的限制。
一些研究人员通过创建可以连接到现有仪器钳口的专用夹具在这方面取得了成功。
另一种方法是重新思考手术器械的设计:力传感器的设计可以与灵巧仪器的设计集成。
下图为由德国 DLR 的研究人员设计的具有集成力反馈和 3D 视觉功能的双手操作机器人手术系统。
该系统由专门设计的灵巧力传感仪器、机械臂和远程操作控制器以及可从Force Dimension, Inc.(瑞士洛桑)购买的作为主操纵器的触觉设备组成。
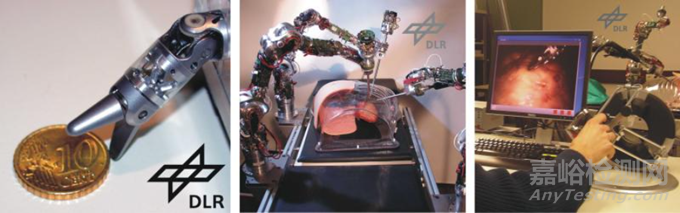
具有集成力反馈和 3D 视觉功能的双手操作机器人手术系统
人工智能、机器学习
人工智能、机器学习使得手术机器人可以利用大量收集到的数据进行学习。学习了一段时间之后,手术机器人的分析、预测等功能会有所提升。
例如,人工智能可以通过分析患者数据和预测潜在并发症来协助术前计划。
2023年5月,Nature杂志上发布一篇文章,题为“使用基于术前数据的机器学习模型实现个性化手术期风险预测”。
研究的目的是创建一个基于机器学习的模型,根据术前数据评估患者术后死亡的个体风险,从而分析个人风险因素。
研究结果表明,创建机器学习模型来预测术后院内死亡风险是可行的,其准确性更高。
再比如,在手术过程中,机器学习算法可以提供实时指导,帮助外科医生做出决策。这可以更准确地识别解剖结构并进行更精确的手术干预。
2020年《斯堪的纳维亚创伤、复苏和急诊医学杂志》上刊登了一份研究报告,研究评估了实时人工智能预测急诊科胸痛患者的主要不良心脏事件的表现。
研究结论是,AI 实时预测模型有较大的应用潜力,可以帮助医生预测胸痛 ED 患者的MACE,需要进一步研究来评估对临床实践的影响。
成像、可视化功能增强
成像技术的进步对于手术机器人的未来至关重要。
高分辨率 3D 成像、增强现实 (AR) 和虚拟现实 (VR) 正在成为外科手术不可或缺的一部分,这些技术为外科医生提供了手术部位的详细实时视图,增强了他们处理复杂解剖结构的能力。
AR技术
AR 是将人工信息添加到一种或多种感官中,使用户能够更有效地执行任务。这可以使用叠加图像、视频或计算机生成的模型来实现。
比如 AccuVein(AccuVein Inc.,美国纽约),这是一种类似投影仪的设备,可显示皮肤表面的脉管系统图。

使用 Accuvein 对患者的静脉进行成像
VR 技术
生成沉浸式、完全人工的计算机模拟图像和环境,并进行实时交互。VR 用于内窥镜培训和评估已有十多年。该技术将超越当前远程学习和二维视频的保真度,从操作员的角度创造近乎真实的体验。
例如,MOVEO 基金会使用 Oculus Rift 平台,将学员置于手术外科医生的虚拟视图中,为观看者提供了正在执行的过程的第一人称视图。

Oculus Rift 平台
AR和VR还可用于手术培训,使外科医生能够在模拟环境中练习手术。这不仅提高了他们的技能,还降低了对真实患者进行培训的风险。
2016年,首个全球直播的 VR 手术在伦敦皇家医院成功进行,并在全球医学领域引起了广泛关注。

该体验本身提供了从手术台头部观看手术室的 360 度全景,并为观看者提供了患者的视角,未来也许模拟真实手术现场培训会是医疗教育的重要一环。
小而灵活
微型机器人可用于需要高精度的精细手术,例如神经外科或心血管干预。侵入性较小,可缩短患者的康复时间,最大限度地降低并发症风险。微型机器人还可以协助药物输送和抗癌靶向治疗。
临床微型机器人最大的挑战之一是环境因素,因为微型机器人系统对温度、湿度和表面化学敏感,更不用说人体环境及其不断变化的生理条件(软组织与血液)和生物事件的复杂度。
目前,范德比尔特外科与工程研究所 (VISE) 研究小组正在进行磁性柔性内窥镜的第一个 1 期临床试验,该内窥镜有可能为标准结肠镜检查提供更安全的替代方案,特别是对于患有炎症性肠病 (IBD) 的患者。
远程手术,远程操作
远程手术操作允许外科医生使用通过互联网连接控制的手术机器人系统远距离执行手术。Covid-19 大流行凸显了远程医疗解决方案(包括手术机器人)的重要性。
远程手术的主要优点是它能够克服传统手术的局限性,例如及时且高质量手术技术可能因为地理因素无法更广普及;外科医生短缺、外科医生日程安排有限、手术成本高等。
不过目前远程手术面临的挑战也不少。
首先是患者安全与隐私,尤其是通过互联网传输患者数据的敏感图像,可能会受到网络攻击、网络连接不稳定、网络延迟的影响。
其次初始实施远程手术和维护的成本较为高昂;再者还需考虑法律、道德层面的问题;网络延迟、网络攻击会导致手术时间增加,手术不确定性增加。
并且,现在的远程手术标准操作程序尚未明确树立,患者可能不会优先考虑远程手术。
未来发展趋势预测
技术进步,不断变化的临床需求正在影响手术机器人的未来,并且有可能推动提高精度、效率和患者治疗效果,重新定义外科手术实践。
以下是福布斯杂志列举的手术机器人未来发展的四大关键趋势:
自动化程度提高
随着人工智能和机器学习的不断发展,预计外科手术的自动化程度将会提高。
机器人将能够自主执行日常任务,使外科医生能够专注于手术中更复杂的方面,不仅可以提高效率,还可以降低人为错误的风险。
手术机器人应用领域扩大
虽然手术机器人主要用于骨科和普通外科等专业,但其应用正在迅速扩大。预计在妇科、神经外科甚至牙科手术等领域会得到更多采用。
与其他医疗技术的集成
手术机器人的未来在于它们与其他先进医疗技术的集成。例如,将机器人系统与先进成像、人工智能驱动的诊断和实时数据分析相结合,可以创建综合性较强的手术解决方案。
更便捷、更实惠
随着技术进步和规模经济发挥作用,相比过去,未来手术机器人系统将更易获得,世界各地的医院和外科中心有能力更广泛采用手术机器人技术,为更多病患提供先进的外科护理服务。
结语
手术机器人技术未来的发展充满希望,但也存在挑战。
患者由于对这一技术缺乏足够的理解,有时会对手术机器人存在怀疑,因此需要进行必要的医疗技术教育,阐明手术机器人的优点。
另外,不同国家均需要明确的监管指南和强有力的风险管理策略。外科医生和医务人员的标准化培训计划对于确保熟练使用机器人技术也至关重要。
解决这些挑战,手术机器人行业有望可以实现长足的进步,使手术更安全、更精确、更容易实现,让全世界的患者受益。

来源:MedRobot


