导 语
近日,北卡罗来纳大学的研究人员针对下肢假肢的直接控制,探讨了使用运动单元放电能否提高下肢踝关节运动意图解码的准确性。研究表明,利用膝下的完好肌肉和截肢残余肌肉的肌电信号,运动单元放电可以准确预测踝关节等距背屈和跖屈的扭矩。相关成果发表在《IEEE Transactions on Neural Systems and Rehabilitation Engineering》杂志上。
1、研究背景
动力下肢假肢通过自主操作协助用户进行各种生物力学上定义明确的周期性运动,具备改善下肢截肢患者活动能力的潜力。然而,对于许多涉及复杂或独特生物力学的日常活动(如坐到站或蹲)和娱乐活动(如自由式舞蹈和攀岩等),由于存在动态的姿势调整,自主控制器难以考虑到用户适当调整肢体动力学的意愿,导致其预编程具有挑战性。
为了应对这一挑战,通过神经-机器接口直接将用户的运动意图集成到辅助和康复设备的驱动控制中。由于可以提供无创和直接的设置,表面肌电图是神经假肢控制的一种主要选择。在使用直接连续的肌电控制假肢时,肌肉活动通常被量化为肌电图的幅值,这是神经运动控制命令的粗略估计。肌电图是运动单元(MU)动作电位(MUAP)和相应放电时间的卷积。当使用肌电振幅表示神经驱动时,重叠的MUAP被抵消,导致信号损失。使用MU放电可以缓解重叠MUAP抵消带来的信号损失和噪声干扰。因此,在解码神经肌肉控制并估计用户的预期关节扭矩方面,使用MUAP和脉冲序列可能比传统肌电振幅更精确。
虽然对下肢肌电假肢的研究不断增加,但是很少有研究探讨基于肌电图和基于MU的下肢连续运动意图解码在完好肌肉和截肢残余肌肉中的准确性差异。为了填补这一知识空白,这项研究要求膝关节以下截肢者和未截肢者调节完好和残余踝关节背屈肌和跖屈肌的激活。在分析中,研究人员比较了三种解码器在估计踝关节扭矩方面的准确性。基于使用运动单元放电率表示神经驱动的优势,研究人员假设基于运动单元的解码器在完好和截肢残余肌肉中都优于肌电图。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
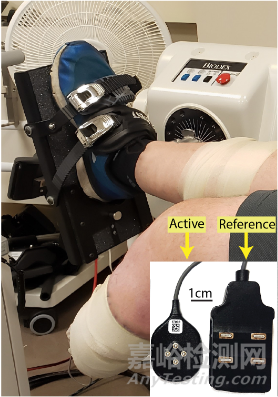
这项研究共招募了8名未截肢者(NON)和7名截肢者(AMP)参与实验。使用4个表面电极(Galileo, Delsys, Inc., Natick, MA)采集肌电图。电极放置在每侧肢体的胫骨前肌(TA)和外侧腓肠肌(GA)上。AMP的完好肢体被固定在附加设备上,脚踝平行于测力计的旋转轴(System 4 Pro, Biodex, Shirley, NY)。NON在相同的配置下分别进行双侧肢体的实验。
图1:实验设置(图片来自原文)
受试者通过追踪TA和GA的目标肌肉活动,进行等距背屈和跖屈,同时记录踝关节扭矩。为了匹配假肢和完好肢体的活动,AMP用残余的TA和GA反映肌肉激活。
图2:AMP2完成的代表性实验任务(图片来自原文)
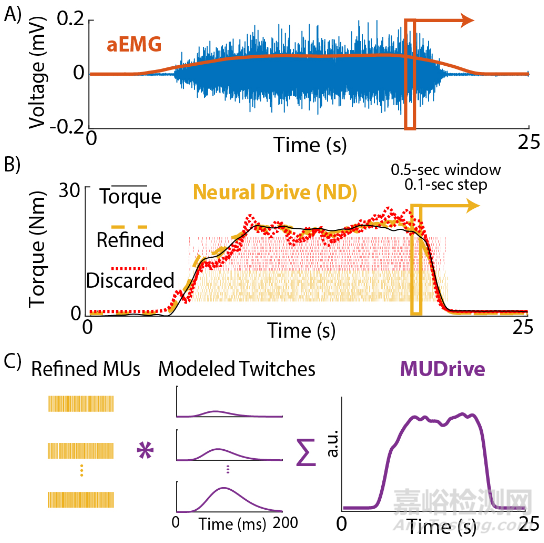
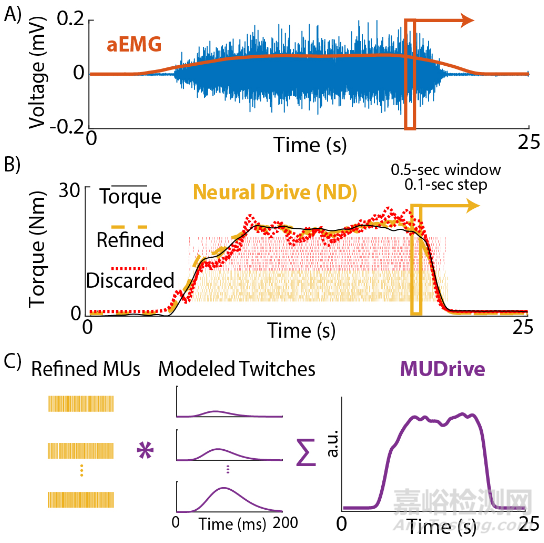
这项研究比较了基于:1)肌电振幅(aEMG);2)代表神经驱动的MU放电频率(ND);3)MU放电与短时收缩力模型卷积(MUDrive)的用于踝关节扭矩估计的神经肌肉解码器(线性回归)的准确性。
图3:踝关节扭矩估计方法(图片来自原文)
研究结果表明,MUDrive在NON的肌群、AMP的完好和残余肌群中的表现均明显优于aEMG和ND方法。相比于辅助设备(如外骨骼和动力假肢)的直接肌电控制,将MU放电与生物力学模型的输出相结合,可能提供更准确的扭矩控制信号。
图4:踝关节扭矩估计结果(图片来自原文)
3、研究意义
这项研究证明了使用基于MU解码的神经接口来估计缺失关节扭矩并用于下肢假肢控制的可行性。基于MU的运动意图解码模型的应用可能为动力肌电假肢和神经机器接口提供更精确的控制输入信号。
参考文献:Rubin, N., Hinson, R., Saul, K., Hu, X., & Huang, H. (2023). Ankle Torque Estimation with Motor Unit Discharges in Residual Muscles following Lower-Limb Amputation. IEEE Transactions on Neural Systems and Rehabilitation Engineering. https://doi.org/10.1109/TNSRE.2023.3336543