1、智能化发展路径
特斯拉自研汽车智能化的大部分关键软硬件,国内三家造车新势力跟紧步伐,逐步针对核心硬软件开始自研之路
特斯拉与国内三家造车新势力的自研能力对比
在传感器方面,特斯拉与Liminar合作研发激光雷达,而国内三家新势力则购买合作方产品;在毫米波雷达和超声波雷达供应上,蔚小理主要使用博世的产品。在决策层方面,特斯拉自研自动驾驶芯片、域控制器、中间件、操作系统,并全面覆盖软件应用。蔚小理从选择Mobileye的自动驾驶芯片到选择英伟达的芯片,并开启了中间件和操作系统的自研道路。
特斯拉及蔚小理选择自研电子电气架构,目前特斯拉已研发出域集中式E/E架构并引领行业变革。四家车企在选择与百度、高德、谷歌、腾讯等地图企业合作而非自研。在转向和制动系统方面,博世和布雷博的产品颇受青睐。特斯拉自建数据中心训练数据引擎,蔚小理则选择与阿里云、星辰天合等公司进行合作。
2、电子电气架构
从Model S到Model 3,特斯拉电子电气架构发生了从分布式功能的域控制器到中央集中式的重要变化,ECU数量也随之减少
特斯拉的电子电气架构
目前传统车企仍以分布式架构为主,特斯拉的电子电气架构较为领先且在不断进步深化,特斯拉中央集中式的电子电气架构是其实现软件定义汽车的基础。
3、座舱域控制器
特斯拉Model S和高性能版Model Y搭载第三代座舱域控制器, 采用AMD锐龙处理器,打造最流畅顺滑的车机体验
特斯拉的三代座舱域控制器
特斯拉前两代座舱域控制器的主计算芯片分别为英伟达Tegra 3 T30和英特尔车规级处理器Atom A 3950,闪存使用的是读写相对较慢的eMMC,因此车机系统运行缓慢。第三代座舱域 控制器采用AMD锐龙嵌入式处理器,将eMMC换成SSD,内闪的读写性能和寿命明显增加;因此,在车机实际体验中,应用程序打开、网页载入速度明显变快、游戏也能更流畅运行。
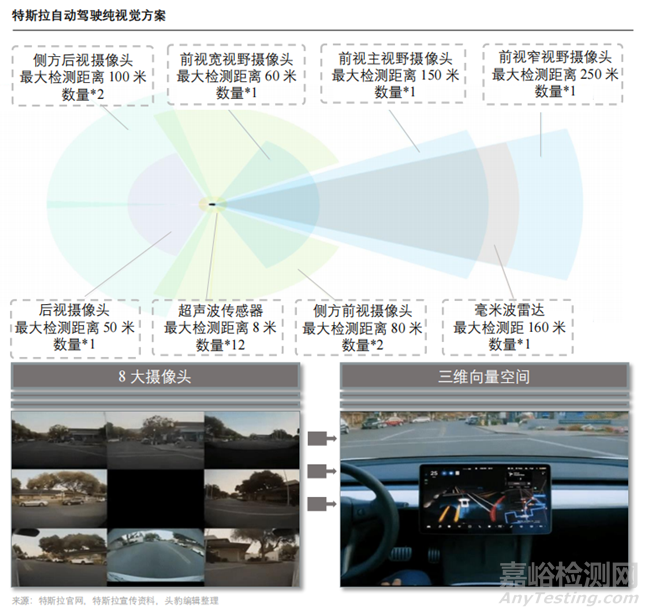
4、自动驾驶纯视觉方案
特斯拉的自动驾驶架构是基于纯视觉方案,采用原始数据通过神经网络构建真实世界的三维向量空间,实现汽车的路径规划
特斯拉的自动驾驶纯视觉方案
自动驾驶方面,区别于国内车企的“视觉+激光雷达”方案,特斯拉采用纯视觉方案。纯视觉方 案共配有环绕车身的8个摄像头,视野范围可达360度,对周围环境最远监测距离达250米;还配置12个超声波传感器和1个毫米波雷达来探测物体,与视觉系统相配合实现泊车引导。
5、自动驾驶芯片
特斯拉当前采用以NPU为核心的主控芯片,外采Aptina摄像头的自动驾驶方案,得益于充沛资金,公司开启核心自研模式
特斯拉自动驾驶芯片供应链模式及芯片介绍
2014年起,特斯拉历经外购主控芯片到核心自研的发展历程。2014~2016 年,特斯拉配备的是基于Mobileye Eye Q3芯片的AutoPilot HW1.0计算平台;2016~2019年,基于英伟达DRIVE PX 2 AI计算平台打造Hardware 2.0;2017年,起特斯拉开启自研主控芯片;2019年, AutoPilot HW3.0平台搭载Tesla FSD自研版本的主控芯片。
6、OTA技术
特斯拉率先在汽车上应用OTA升级,汽车软件能像智能手机实现在线升级,实现智能座舱、智能驾驶、转向控制的功能更新
特斯拉的OTA技术
特斯拉早期的Model S和最新的Model 3均具备整车OTA 能力,从而通过云端实现动力系统域、座舱娱乐域、车身电子域、底盘和自动驾驶域的升级。
7、影子模式
特斯拉通过影子模式采集和触发新的Corner case数据,快速锻炼和修正自动驾驶神经网络模型,构建自动驾驶技术竞争壁垒
特斯拉的影子模式
特斯拉借助量产车队的扩张,建立数据闭环,通过数据引擎充分将数据流转化迭代驱动力,实现自动驾驶技术的迭代进步。每一款特斯拉量产车都配备有影子模式,负责在用户驾驶过程中采集各类驾驶数据,其中包括高价值的corner case数据。数据引擎将高价值数据送往自动标注系统从而快速生成真值,用以迭代神经网络模型,实现自动驾驶技术的自我演进。