您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2018-06-13 08:54
触觉感知依赖于传感,加工和学习的全面活动,这极大地影响了我们与外部环境的相互作用。生理上,触觉刺激由嵌入皮肤的感觉神经元上的受体检测。信号沿着长链的传入轴突发送到突触使突触后神经元可以进一步处理。神经元通过集成和调制同步触觉刺激和异步触觉刺激,以在动作/感知循环中获得触感的多级特征(图1a),这成为触觉感知的基础。通过实践和/或培训,习得专业知识可以进一步提高触觉感知能力,这使得我们能够精确地感知并对现实世界的事件做出恰当的反应。因此,赋予机器人和假肢以这种感知学习能力可以延伸他们的认知和适应能力。为了达到这个目的,需要研发具有知觉学习能力的人工感觉神经元。
过去已经有人提出通过集成传感和处理元件来模拟感觉神经元。例如,在通过集成阻变器件与电阻式压力传感器实现了触觉记忆。虽然这种设计能够在触摸撤去后仍保留触摸信息,但它不能直接区分触觉的模式。最近有人提出用一种由基于晶体管的压力传感器和电解质作栅介质的突触晶体管组成的器件来区分触摸速率。虽然这种器件能够区分触觉模式,但该器件缺乏识别和认知所需的学习能力。因此,在设备/系统级别实现学习能力对于强健的、具有容错性的触觉刺激处理非常必要。此外,在现有触觉仿生器件上增加学习能力最终将为机器或系统提供人工智能,以使他们能够复制人的“认知”功能。
近日,南洋理工大学陈晓东教授课题组(通讯作者)联合中科院宁波材料所竺立强研究员团队在国际顶级期刊 Advanced Materials上发表 “An Artificial Sensory Neuron with Tactile Perceptual Learning”的论文,第一作者是万昌锦博士。皮肤内的感觉神经元形成外部物理现实与内部触觉感知之间的接口。这个接口使得我们通过知觉学习来组织、辨别和理解感官信息。知觉学习–即通过学习过往经验来提升感知能力的过程。这个工作提出了一种人造触感神经元,它可以通过整合和区分所触摸图案的时空特征来进行智能识别。该系统包括传感,传输和处理部件,分别与感觉神经元中主要部件相对应。其中,电阻式压力传感器将压力刺激转换为电信号,软的离子导体通过界面离子/电子耦合把该电信号传输至突触晶体管。在此基础上,通过实施机器学习方法,该神经元的识别错误率可以从44%显著降低至0.4%。这项工作设计和使用神经形态电子皮肤,将向人工智能机器人和假肢迈进了一步。
研究人员展示一个模拟触感神经元的神经形态触觉处理系统 (neuromorphic tactile processing system),并命名为NeuTap。它能够模拟感觉神经元并且能够实施知觉学习。在他们的设计中,感受器、轴突和处理感觉信息的突触分别由电阻式压力传感器,离子电缆和突触晶体管所模拟(图1b)。压力传感器将压力刺激转换为电信号,离子电缆通过界面离子/电子耦合将电信号传输至突触晶体管。突触晶体管然后根绝刺激模式的不同产生特定的衰减特性。此外,该设计提供了一种事件驱动的方法,即利用外部刺激来激活突触器件。证明了NeuTap能够通过提取时空相关的触觉特征来识别触觉模式,同时能够通过在系统中实施感知学习来提高这个识别能力。
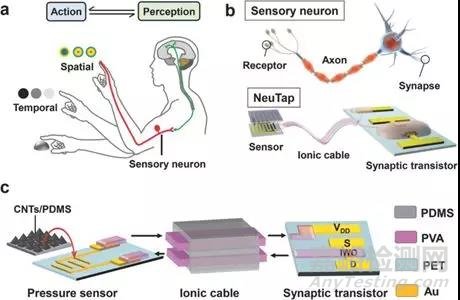
a)示意图说明在动作感知循环中由触觉感觉神经元对触觉模式的空间和时间特征的整合。 b)与NeuTap(底部)相比感觉神经元(顶部)。 c)图解说明NeuTap的细节。
NeuTap原型与生物感觉神经元相似,由软的离子电缆把传感元件和处理元件隔开。这种分离可能有利于抑制两个组件之间的串扰,并为系统赋予可拉伸性。详细的原理图如图1c所示。电阻式压力传感器由两层组成(图1c):构成压敏层的顶层,其是用碳纳米管(CNT)涂覆的具有金字塔形的聚(二甲基硅氧烷)(PDMS);和底部的一个聚对苯二甲酸乙二醇酯(PET)为衬底,沉积用于检测电阻变化的金叉指电极。图2a显示了传感器响应不同施加压力时的电阻变化,其中电阻随压力增加而显着下降,并且该传感器的灵敏度在低压力范围(0.1-1kPa)显示逐渐衰减特性。离子电缆包括两个连接到压力传感器上叉指电极两端的离子导体聚乙烯醇(PVA)为导线。 PVA具有较高的断裂应变和良好的离子电导率,适用于软离子导线。 PDMS被用作PVA基离子导体的绝缘和封装材料。图2b所示的PVA层的Cole-Cole图显示了一个理想的半圆形,这表明理想的Debye型行为。PVA层的离子电导率约为3×10-3 S cm-1。而且,即使在高达≈40%的拉应变下,离子电缆仍能保持良好的导电性。在突触晶体管侧,一条PVA导线连接金电极(VDD)以提供电压,另一条PVA导线覆盖在铟 - 钨 - 氧化物(IWO)沟道上并充当栅极电介质。图2c显示PVA为栅介质的IWO晶体管五次的传输曲线,表明其典型的场效应晶体管性能。 VGS的扫描速率为0.05 V s-1,采样频率为1 Hz。实现<10 nA的低漏电流,说明PVA栅介质具有良好的绝缘性能。

a)图表显示对传感器施加不同压力时电阻和灵敏度的变化。插图:压力传感器的数字图像。
b)PVA层的Cole-Cole图显示完美的半圆形。插图:离子电缆的数字图像。
c)示出五次VDS = 1.5V的PVA栅控IWO晶体管的传输特性的图。插图:PET基片上晶体管的数字图像。
d)当两个连续的时间间隔(ΔT)为200ms的电压脉冲(-1.5V,10ms)施加在栅极上时,突触式晶体管的PPF仿真显示两个电流峰值。插图:作为时间间隔(ΔT:从20到500毫秒)的函数的两个电流峰值之间的比率图。
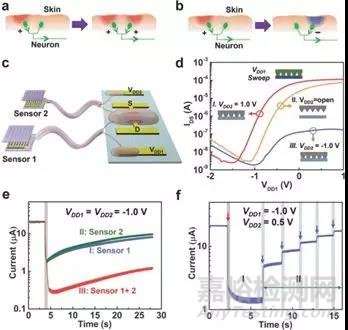
显示两个空间独立的刺激整合的示意图:a)两个刺激(红色圆圈)表示可以激发感觉神经元并增强神经元活动的反应; b)一个刺激可以激发(红色圆圈),而另一个可以抑制(蓝色圆圈)感觉神经元活动并加速从第一次刺激恢复。 c)示出具有两个压力传感器的NeuTap神经元的器件结构图。 d)显示传感器2对具有VDD1电压扫描的IWO晶体管的传输曲线的调制效应的图。 e)当单独按下传感器1和传感器2时(情况I和情况II)以及当同时按下两个传感器(情况III)时,绘制显示当前响应的电流响应,其中VDD1 = VDD2 - 1.0 V. f)VDD1 = -1.0 V和VDD2 = 0.5 V的两个传感器的电流积分。情况I:在开始时用手指触摸传感器1(红色箭头)触发。情况二:在传感器2上触摸五次(蓝色箭头)。灰色区域表示所有情况下的触摸动作,电流的测量值为VDS = 1.5 V.

a)显示手指上的NeuTap的数字图像(左)以及触感图案组合及其相应的二位二进制代码标签(右)的示意图。比例尺是1厘米。
b)显示NeuTap对三种触感图案组合的典型响应。另外两种类型用淡色曲线作为比较。电导率用VDD = -1.0V测量。
c)说明实施知觉学习仿真的机器学习方法的示意图。
d)绘图显示了四组训练数据的RI。每个图案对都用浅色线条显示。绿色虚线点线代表标签边界。模式“00”由RI <10%定义。
e)将识别错误率绘制为关于学习次数的函数。黑色方块是测量数据,红色线是拟合曲线。
图4b中的电导数据为NeuTap对不同触觉图案响应的特征曲线,它们被用作示例测试数据集来测试识别能力。基于机器学习算法,根据历次的特征曲线可以得到分类图案的边界。结果表明,习得的边界是有效的,并且可以用于在移动触摸动作之后立即识别未标记的数据,这使得机器人的“大脑”能够优先处理更紧急和重要的任务。然而,对于新的识别任务来说,“学到的界限”并不总是没有差错的。响应于同一个的图案,由于操作误差使得每次输出之间存在一定程度的差异,这可能会导致一定程度的误判。这个工作中,错误率是通过比较每个时间点的学习边界和新数据集来计算的。例如,第一次学习可以观察到约44%的错误率,如图4e所示。这是因为习得的边界仅基于一个训练数据集获得,对于新数据集的测试会产生较大误差。。我们在图4e中的结果显示了通过增加学习时间逐渐衰减的错误率趋势,并且在六次学习中实现了非常低的≈0.4%的错误率。这是因为输出变化的范围随着多次测试而变得更稳定,因此经过多次训练后,边界可能会更加准确。因此,NeuTap的识别能力可以通过重复训练来提高,这与知觉学习过程相似。由于给定对象的表面可能由平面和凸起图案的各种组合组成,因此这种方法可推广到识别更复杂的图案,比如盲文识别等。
研究人员研发的NeuTap神经元由电阻式压力传感器,离子电缆和突触晶体管组成,具备生物感觉神经元的基本形态和相似功能。NeuTap神经元可以整合和调节时空相关的触觉刺激,实现并行的感觉信号处理。触觉图案的特征因此可以被这样的系统集成和提取以用于模式识别。更重要的是,通过反复训练可以提高识别的准确性,证明了与感知学习过程非常相似。该系统可能与神经形态网络集成在一起,用于复杂的识别/决策活动,为脑机界面提供指导。此外,由神经形态部件呈现的并行计算性质将可以潜在用于集成多种感官反馈(例如,视觉和本体感受)以深度地、全面地提升机器人、假体的精巧性。

来源:材料人


