前言导读
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
经过数十年发展,手术机器人现在主要用于五个快速增长的主要外科领域,其中的骨科、介入手术机器人是及其重要的一个版块。
手术机器人市场概览
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
根据Frost & Sullivan的统计,2020 年全球机器人手术市场规模为 61 亿美元,预计从 2021 年到 2028 年将以 17.60% 的复合年增长率增长,到 2028 年将达到 222.7 亿美元(折合人民币约为1414亿元)。
我国手术机器人市场发展迅猛,根据Frost & Sullivan的统计,市场规模由2016年的人民币853.6百万元增至2020年的人民币2,934.5百万元,年复合增长率达36.2%,预计2030年中国手术机器人的市场规模将达至人民币58,425.9百万元,年复合增长率为34.9%。
手术机器人是将机器人技术应用在医疗领域,显然的,机器人手术是使用机器人系统完成的外科手术类型,机器人辅助手术的开发旨在克服现有的微创手术程序的局限性,并增强外科医生进行开放手术的能力。
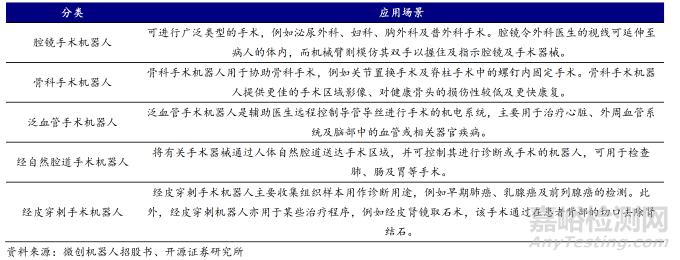
手术机器人集成了医学、材料学、自动控制学、数字图像处理学、生物力学、机器人学等诸多学科为一体的新型交叉科学。一般情况下,从临床医学应用角度可将手术机器人主要分为腔镜手术机器人、骨科手术机器人、泛血管手术机器人、 经自然腔道手术机器人、经皮穿刺手术机器人。
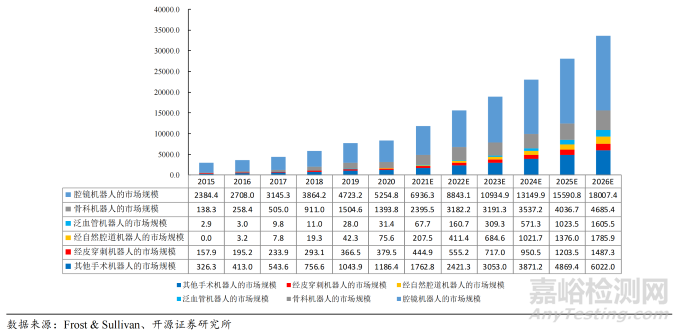
下面两幅附图分别给出了各主要细分手术机器人的应用场景和市场规模情况,供各位读者参考。
笔者认为,随着时间发展,对于国内手术机器人市场而言,各大厂商会面临如下5个方面的竞争,分别为:
1.技术战,入局者众多,内卷严重,而且在技术上目前国外先进巨头具有一定优势,国内厂家只有通过技术上“高人一等”才能“脱颖而出”。
2.临床战,目前手术机器人虽然种类繁多,但是依然是医械法规强监管的产业,且市场受众面以大城市的大医院为主体,在如此众多的品牌上市过程中,临床资源就显得弥足珍贵。
3.融资战,手术机器人是一个多学科高度集中的产品,研发周期长,临床要求高,各方面人力资源也紧张稀缺,必然需要高额的投入,这些都需要大量的资本投入,因此手术机器人的玩法从资本市场来讲其实就是“谁的资本强谁成功率大”。
4.营销战,随着国内、国外厂商的产品逐步上市,需要“卖出去”,也需要市场各群体的认同,更需要占据市场率,因此在众多同类型同适应症的手术机器人中“卖得好”才是各大厂商的终极目标,才是“长久之计”。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
康多手术机器人概览
康多机器人是针对各类复杂的微创外科手术打造的一款腔镜手术机器人,在精确操作、消除震颤、提高医生舒适度等方面较传统腔镜手术存在显著优势。康多机器人适配自有及国内外主流三维高清内窥镜系统,能够让手术医生通过内窥镜实时获取手术视野,在复杂的手术环境中精准触及手术区域,并通过主从控制系统在患者的手术区域完整复现医生的操作意图。康多机器人SR1000是国内首个在泌尿外科领域进入创新医疗器械特别审查程序(绿色通道)的腔镜手术机器人,该产品于2022年6月在泌尿外科领域获得第三类医疗器械注册证。康多机器人第二款产品 SR1500 和第三款产品 SR2000 已经提交型式检验。
传统腔镜手术操作难度较高。手术过程中,医生将手术器械和内窥镜通过患者体表的切口伸入患者体内获取手术视野并开展手术操作。受限于患者体表固定的切口位置,医生手部操作方向与器械末端移动方向相反,这种“筷子效应”进一步增加了传统腔镜手术的操作难度。
康多机器人针对传统腔镜手术的不足进行了若干创新性设计,具备显著的临床价值。其主从控制模式使得医生手部操作方向与手术器械末端移动方向一致,使医生在腔镜手术中获得了直觉操作体验。其三维高清内窥镜系统可以将手术视野稳定清晰地呈现在医生眼前的显示屏上,还能根据医生需求调整视野范围和大小。其机械臂末端的手术器械可以实时复现医生的手术动作,在精准执行医生切开、缝合、打结、抓取、夹持和分离等一系列动作的同时,智能识别并过滤医生手部震颤,最大限度的保证手术的精准与安全。相较于传统腹腔镜手术,康多机器人一方面可使患者的术中出血量更少、减少术中及术后并发症、缩短术后恢复时间,另一方面,可缩短医生学习曲线、降低医生在手术中的疲劳度、延长医生执业寿命。
康多机器人为自主研发的技术成果。公司设计了全新的机械臂系统,确保手术器械在术中始终安全可靠地围绕患者体表切口做远心不动点运动。根据医生手术操作习惯研发了开放式医生控制台,与进口同类产品的暗箱式医生控制台设计相比,可以显著减少医生在术中的视觉疲劳,同时避免了医生术中长期保持颈部屈曲姿势而导致的颈部僵硬等不适症状。公司开发了主操作手和基于EtherCAT 总线的运动控制器,实现了主从实时控制。公司根据自主研发的机械臂结构,结合各类术式和患者情况总结出康多机器人腔镜手术最优的患者体位和打孔位置,并基于机械臂柔顺力控制,实现了不同术式下的快速摆位。公司还根据产品特性和中国医生手术习惯开发了系列手术器械,适用于更多手术操作场景,在手术方案制定过程中给予医生更多选择空间。
康多机器人在国内顶尖医院开展临床试验,试验结果优异。康多机器人®SR1000 的临床试验合作单位包括北京大学第一医院、中国医学科学院北京协和医院、北京大学第三医院、北京医院等。针对肾部分切除术和前列腺癌根治术的两项各自单一术式前瞻性、多中心、随机、平行对照设计的临床试验结果显示,康多机器人SR1000 与对照组达芬奇手术机器人在主要有效性终点手术成功率方面达到 100%。同时,在试验的主要及次要有效性评价指标、安全性评价指标方面,康多机器人SR1000 与达芬奇手术机器人相比均无统计学差异,表明康多机器人SR1000 已和达芬奇手术机器人在临床使用的安全性、有效性上实质性等同。此外,康多机器人SR1000 在这两项临床试验中的 NASA-TLX 任务负荷评估上均显著优于达芬奇手术机器人,在关于前列腺癌根治切除术的临床试验的术中操作感受上显著优于达芬奇手术机器人,体现了康多机器人SR1000 在医生使用体验上的相对优势。公司已在中国医学科学院北京协和医院等医院启动了康多机器人®SR1000 在妇科和普外科与达芬奇手术机器人(da Vince Xi)对照的注册临床试验,目前处于受试者入组阶段。在针对市场需求产品布局方面,公司已完成型号分别为 SR1500 和 SR2000 的康多机器人®系列产品样机开发,目前已进入型式检验阶段。
康多机器人已成功应用于远程手术。康多机器人®在 2018 年完成了世界首例 5G 远程腔镜手术机器人动物实验,在 2019 年完成多点协同 5G 远程腔镜手术机器人动物实验,在 2022 年完成跨运营商、跨网域的“5G+固网专线”多点协同远程临床实时交互教学手术。
康多手术机器人技术方案简析
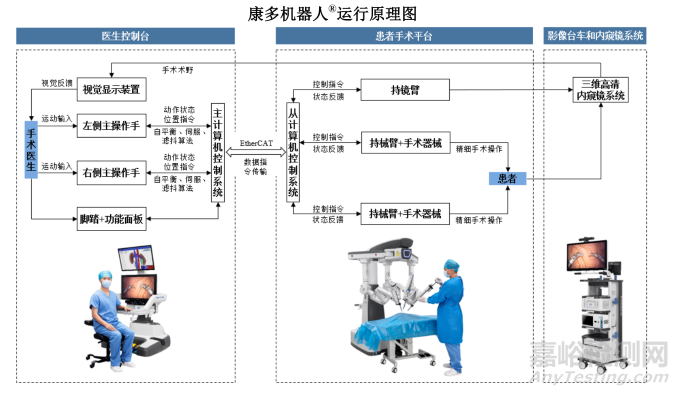
康多机器人由医生控制台、患者手术平台、影像台车、内窥镜系统、手术器械和附件构成,是针对各类复杂的微创外科手术打造的一款腔镜手术机器人,在精确操作、消除震颤、提高医生舒适度等方面较传统腔镜手术存在显著优势。康多机器人适配自有及国内外主流三维高清内窥镜系统,能够让手术医生通过内窥镜实时获取手术视野,在复杂的手术环境中精准触及手术区域,并通过主从控制系统在患者的手术区域完整复现医生的操作意图。
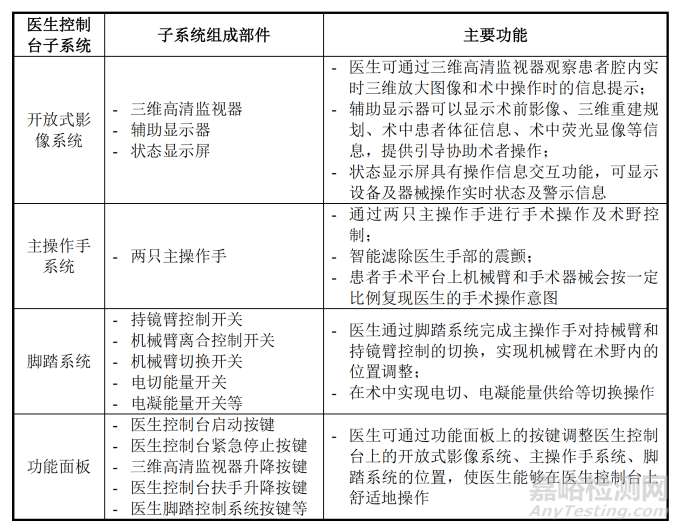
医生控制台
医生控制台由开放式影像系统、主操作手系统、脚踏系统、功能面板等组成。手术过程中,医生坐在控制台前,通过开放式影像系统获取术中的手术区域视野,并通过主操作手系统和脚踏系统来开展手术。主操作手系统和脚踏系统会收集医生通过双手和双脚传递出的操作指令,并将该指令传递到患者手术平台,由患者手术平台对患者实施相应的手术操作。
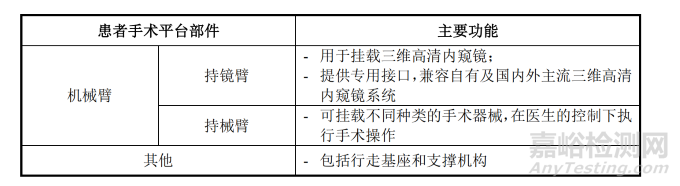
患者手术平台
患者手术平台包括多条机械臂,可以控制手术器械和三维高清内窥镜,每条机械臂具有多个运动自由度,会根据外科医生通过医生控制台传达的操作指令来实现相应的手术动作。
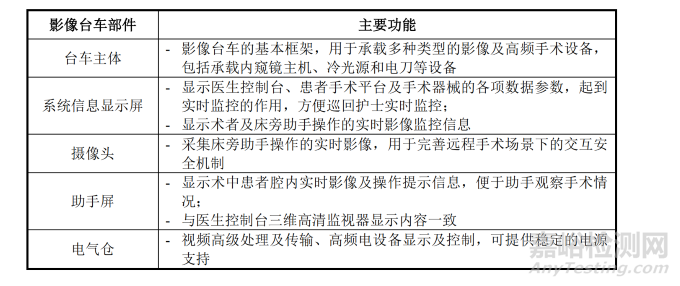
影像台车
影像台车包括台车主体、系统信息显示屏、摄像头、助手屏和电气仓等,可承载多种类型的影像及高频手术设备。
专利简析
哈尔滨思哲睿是国内最早从事手术机器人研发和产业化的企业之一,在技术积累和产品储备等方面具有先发优势,发明专利数量众多。哈尔滨思哲睿自主研发的康多机器人SR1000已完成临床前和临床阶段研究,在关键技术上已实现自主创新,突破国外专利封锁。公司拥有自主研发的技术创新平台,可确保公司能够针对客户实际需求和行业发展趋势,迅速开发安全可靠、质量稳定的新型产品,为本项目的顺利实施提供了充足的技术保障。
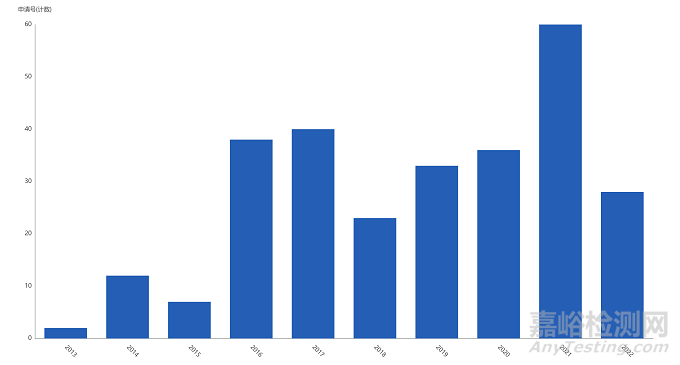
下图给出了哈尔滨思哲睿专利申请状况:
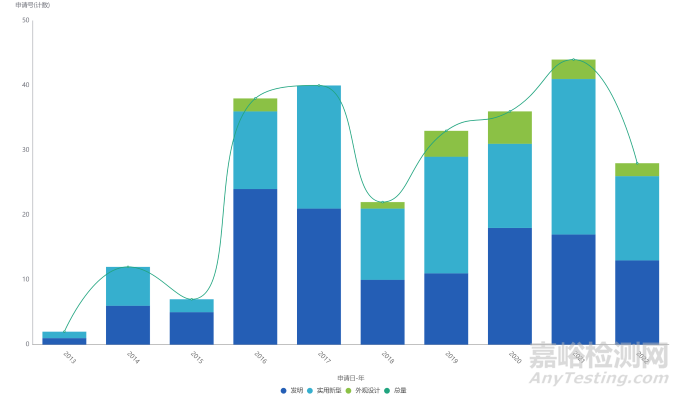
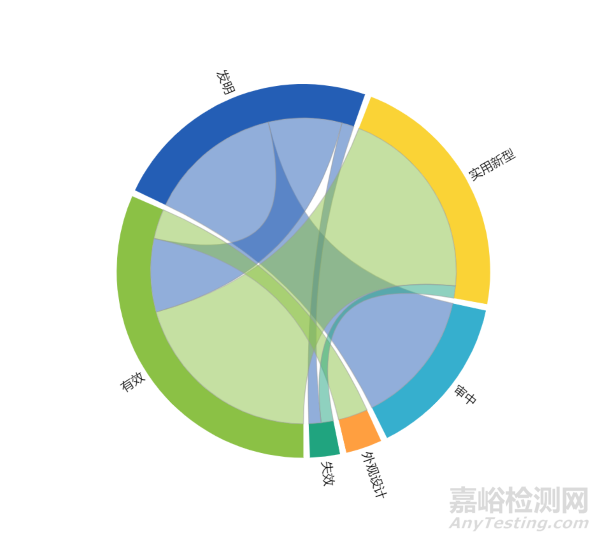
下图给出了不同专利类型比例与申请状况:
下图给出了不同专利类型法律与比例状况:
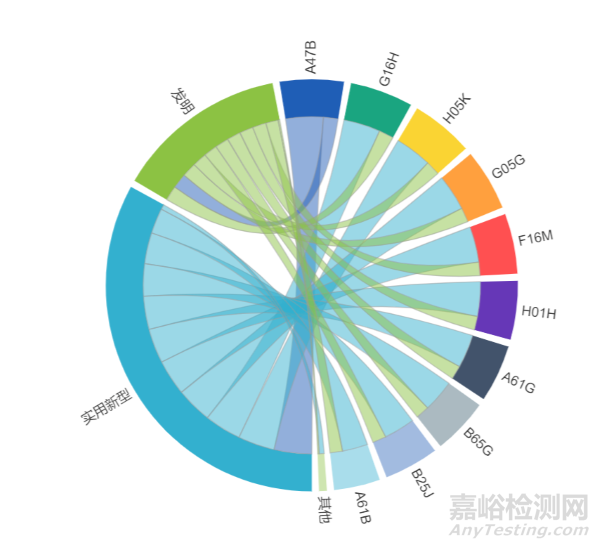
下图给出了有效专利技术分支状况:
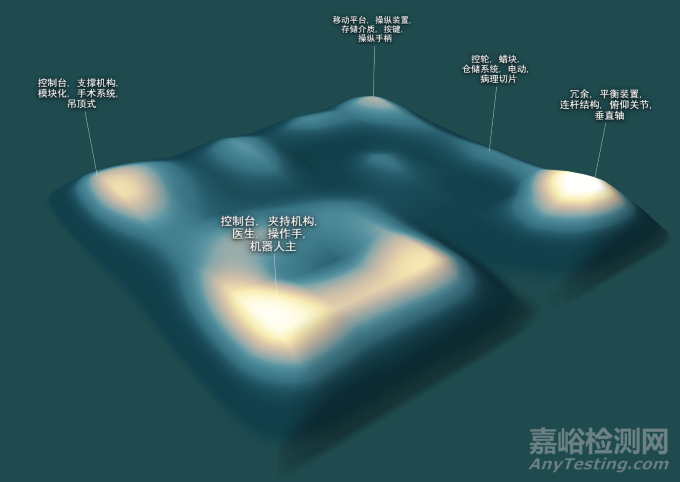
下图给出了专利地图状况:
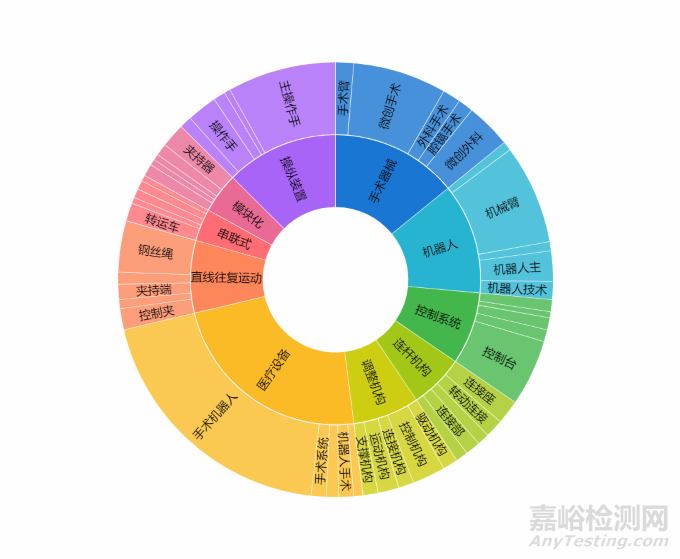
下图给出了专利技术点状况:
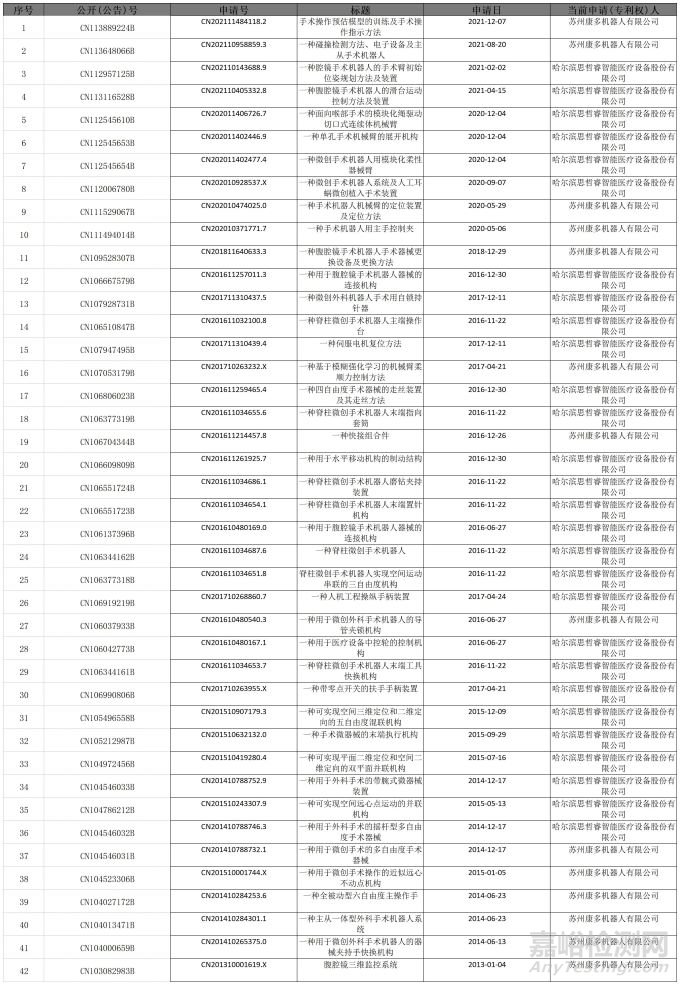
对于重点专利情况,读者朋友可参考如下表格:
需要特别说明的是,笔者已将相关专利汇总成册,形成了一份达433页的文档,读者朋友如需获取该文档,可在本公众号对话框中回复“康多”,即可免费自动获取该专利文档。
结 语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇等先进机器人作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。