人们迫切需要重建具有表皮和真皮功能的人类皮肤,以便与物理世界互动。现有的电子皮肤缺乏全面的功能,通常只关注触觉感应的一个方面。
为了解决这一局限性,中山大学的吴进、北京大学的张海霞、西北工业大学的苑伟政等人提出了一种仿生、超灵敏和多功能的基于水凝胶的电子皮肤(BHES)。BHES使用具有纳米级褶皱的聚对苯二甲酸乙二醇酯(PET)模仿表皮功能,通过接触带电进行精确的材料识别。内部机械感受器由具有粘滑感应功能的交叉指尖银电极模仿,可识别纹理和粗糙度。真皮功能由带图案的微锥水凝胶模仿,实现高灵敏度、大压力范围、低检测限和快速响应/恢复时间的压力传感器。使用深度学习以在识别材料和纹理时实现高精度并最大限度地减少干扰。集成信号采集/处理电路的BHES在可穿戴无人机控制系统、软体机器人和自供电的人机交互界面中展现出巨大的应用潜力。研究成果以“Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin”为题于7月31日发表在《ACS NANO》上。
1. 仿生人造皮肤的设计
在这项工作中,提出了一种仿生、超灵敏、多功能的基于水凝胶的电子皮肤,并将纳米级褶皱图案PET和微锥图案DN水凝胶引入BHES。这种BHES可以连续地将微小的机械刺激转换成电信号。如图1a(i)所示,所提出的电子皮肤主要由多层结构组成,即纳米级褶皱图案PET的播放器、夹在PET和聚酰亚胺(PI)之间的叉指银电极、防脱水和防冻微锥图案DN水凝胶电极和聚二甲基硅氧烷(PDMS)基板。采用纳米级褶皱图案PET模拟表皮,根据各种材料的不同能力,准确识别材料类型,避免接触起电过程中失去电子。使用叉指银电极模拟内部机械感受器,以基于粘滑传感机制识别材料纹理。此外,作为真皮的对应物,水凝胶使制造的电子皮肤柔软且有弹性,并且它还可以充当液体储存器和缓冲器。由于BHES的多层结构,保留了设备的简单性。该设备的尺寸约为20mm × 20mm,总厚度约1mm。
图1 BHES的结构设计
2. 具有多种突出特性的水凝胶的表征
透明聚丙烯酰胺 (PAM)/海藻酸钙 (CA)DN 水凝胶是使用简单的聚合过程合成的。对DN水凝胶进行后处理,将原始DN水凝胶浸入50wt%溴化锂(LiBr)溶液中,引入吸湿性LiBr,赋予其抗脱水和抗冻能力。LiBr溶液处理的水凝胶的分子结构如图2a所示,其中Li在水中分解成Li + 和Br - ,并与水分子键合。更高程度的离子水合确保了更强的结合强度以及更多的结合水分子。
图2 水凝胶各种优异性能的表征
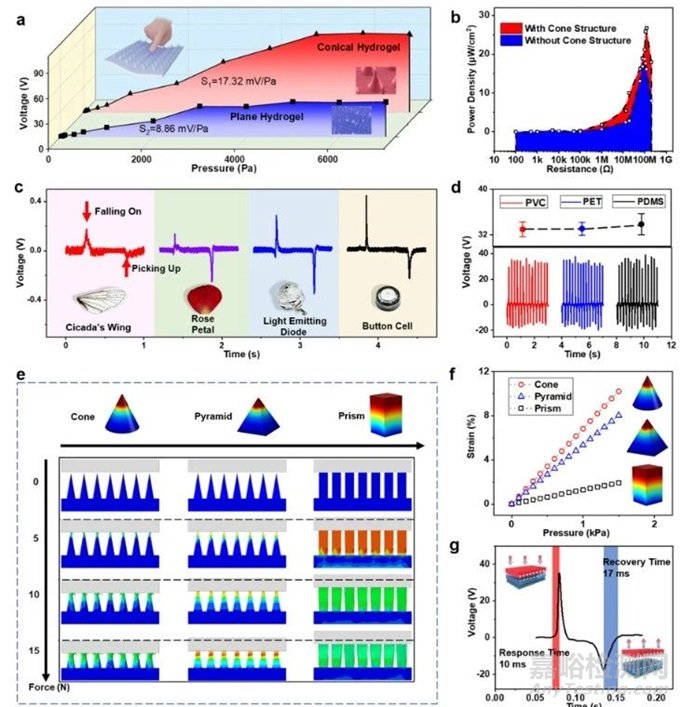
3. 接触材料 - 高灵敏度、不受干扰的压力传感
如上所述,DN水凝胶已经实现了许多优异的性能。据此,微锥图案水凝胶被用作BHES的导电电极和带电层,构成自供电压力传感模块。所提出的传感装置的输出电压是通过摩擦起电和静电感应的耦合产生的。当施加外力时,上部材料识别模块层被压向水凝胶层,从而形成PI和水凝胶的接触对。在这种情况下,减少了接触材料电子亲和力的影响,从而实现了精确的压力传感功能,实验结果进一步验证了这一点。当聚氯乙烯(PVC)、PET和PDMS对传感器施加相同压力时,输出峰值电压几乎恒定(图3d),展示了传感器出色的抵抗接触材料干扰的能力。由于PI和水凝胶的电子亲和力不同,电子会在接触面之间转移。然后,这两种材料的表面带有相同极性的相反电荷。当外力去除时,PI和水凝胶层分离,电子将通过外部电路流入水凝胶层,直到达到静电平衡。由于水凝胶具有弹性,较高的接触压力可以引起水凝胶较大的变形,并在PI和水凝胶之间提供较大的接触面积,从而产生更多的摩擦电荷;因此,输出电压与施加的压力呈正相关,可用于检测压力。
图3 BHES压力传感模块的特性
4. 不受压力干扰的准确材料和纹理识别
识别不同类型的材料被认为是人类皮肤的关键功能之一。然而,使用电子皮肤来正确识别具有相同光滑表面的材料是一个巨大的挑战。由于接触起电和粘滑机制的创造,本研究中的人造电子皮肤可以超越人类皮肤的能力,并借助深度学习技术实现精确的材料和纹理识别。
在本研究中,包括铝、铜、纸、砂纸、Chemigum、硅橡胶、PI、PVC 和 PDMS 在内的 10 种不同材料,以及氟化乙烯丙烯 (FEP) 和 4 个不同材质的铣削碳钢样品。选择Ra0.8、Ra1.6、Ra3.2和Ra6.3的粗糙度值来验证BHES的材料种类和表面粗糙度识别能力。图4a展示了上述10种材料和4种不同碳钢样品的光学图像。当另一个物体在这个粗糙的表面上滑动时,会产生摩擦力和移动速度的波动。这些不规则的运动会导致传感信号的波动,这被用作识别不同纹理特征的原理。受天然人体皮肤褶皱表面的启发,引入纳米级褶皱PET与触摸物体构成摩擦副,通过粘滑机制辅助纹理识别。
图4 材料和粗糙度识别过程和结果
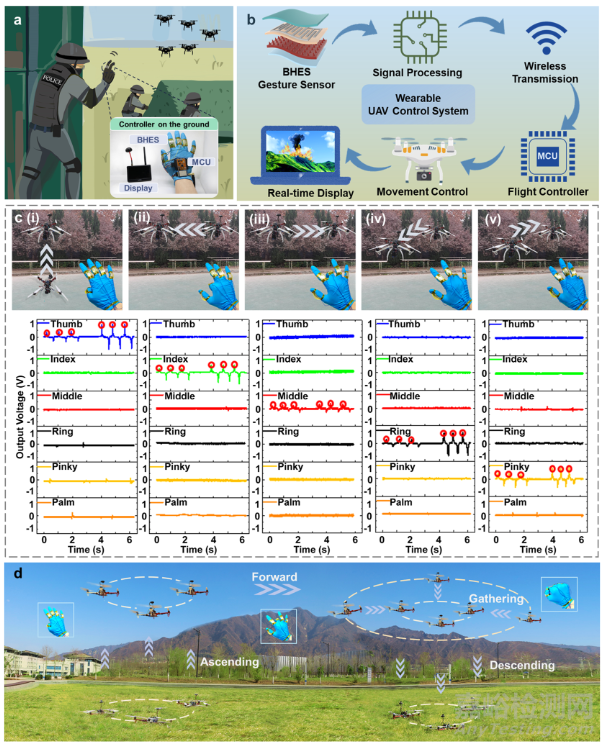
5. BHES-综合无人机控制系统
手势是一种高效的沟通媒介,尤其是对于需要无声换向的反恐场景。因此,本研究将仿人体皮肤的BHES与信号采集和无线信号传输电路相结合,开发了一种无人机控制系统,展示了其在反恐事件中的巨大潜力,如图5a所示。BHES检测人体的手部动作,并将数据传输为电输出信号以操纵无人机。可穿戴无人机控制系统的设置如图5a所示。
图5 人机界面应用的BHES的实现
6. 总结与展望
本文提出了一种仿生、超灵敏和多功能的基于水凝胶的电子皮肤,它可以模仿表皮和真皮的功能,从而实现精确的材料识别、纹理识别和压力传感。BHES采用纳米级褶皱图案聚对苯二甲酸乙二醇酯来模仿表皮表面并产生接触带电,并采用微锥图案DN水凝胶作为摩擦层和导电电极以提高灵敏度。BHES在宽压力范围(20-5000Pa)、低检测限和快速响应/恢复时间(10ms/17ms)下表现出高灵敏度(17.32 mV/Pa)。采用深度学习来实现高精度识别材质(10种材质为95.00%)和纹理(四种粗糙度情况为97.20%)。
集成信号采集/处理电路的BHES显示出应用于可穿戴无人机控制系统、软体机器人和自供电人机交互接口的潜力。该研究对数字双胞胎和元宇宙应用中的智能机器人具有影响,并在交互式人机界面中展现出巨大的潜力。
文章来源:https://pubs.acs.org/doi/10.1021/acsnano.3c05253