您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2024-04-23 08:31
近日,香港中文大学(中大)跨学科研究团队开发了磁控溶血酶激活剂纳米机器人(tPA-nbots)治疗缺血性中风,溶栓速度提高5-20倍,能有效疏通末梢血管,减少缺血引起的脑损伤。
该团队还利用激光散斑对比影像扫描(LSCI)实时追踪、输送纳米机器人、监测血液流通状况,相关研究结果发表在国际期刊《Science Advances》和《Science Robotics》上。
研发背景
脑卒中,俗称中风,分为缺血性脑卒中和出血性脑卒中两种类型,是全球第二大死因,亦是导致成年人永久伤残和认知障碍的最常见成因。
在此背景下,神经介入技术得到快速发展,尤其是机械取栓技术。然而深入脑远端区域的血管细小且弯曲,机械无法精准控制取栓,因此在这个领域仍然是一片空白。
溶血酶激活剂﹙tPA﹚:常用于溶解急性缺血性中风患者的血栓,然而,若使用高剂量tPA时未能定点输送至血栓,反而让药物散布至身体其他部位,会降低溶栓成效, 甚至造成颅内以至全身出血的风险。
中大医学院内科及药物治疗学系利国伟脑神经学教授及脑神经科主任梁慧康教授强调,及时疏通大脑受阻塞的血管,恢复血流非常重要。他表示:
“中风患者在没有施予任何治疗下,每分钟约有190万个脑细胞死亡。虽然在现有技术下,导管已可进入脑动脉的主干清除血栓,但仍难以进入远离脑动脉主干和更幼细的末梢血管。
我们需要克服此技术瓶颈,发展安全而有效的新技术,以保护大脑功能。”
因此,中大工程学院机械与自动化工程学系、中大医学院影像及介入放射学系和内科及药物治疗学系的跨学科研究团队共同开发了磁控tPA-nbots。
tPA-nbots纳米机器人
tPA-nbots纳米机器人是一种可回收的磁性胶体微群,由tPA(组织型纤溶酶原激活剂)和载体Fe3O4@mSiO2纳米机器人组成。
其中,tPA-nbots核心技术在于Fe3O4@mSiO2纳米机器人。纳米机器人由磁芯、介孔二氧化硅壳和接枝的tPA外层(机器人尺寸约为 300 nm)组成。
工作原理:
将载有tPA-nbots的导管置入到接近血栓的位置;
然后遥控这些纳米机器人到达只有亚毫米大小的血管中,启动溶栓过程;
血块溶解后,tPA-nbots将被导航回到导管,一并离开体内,保证患者安全。
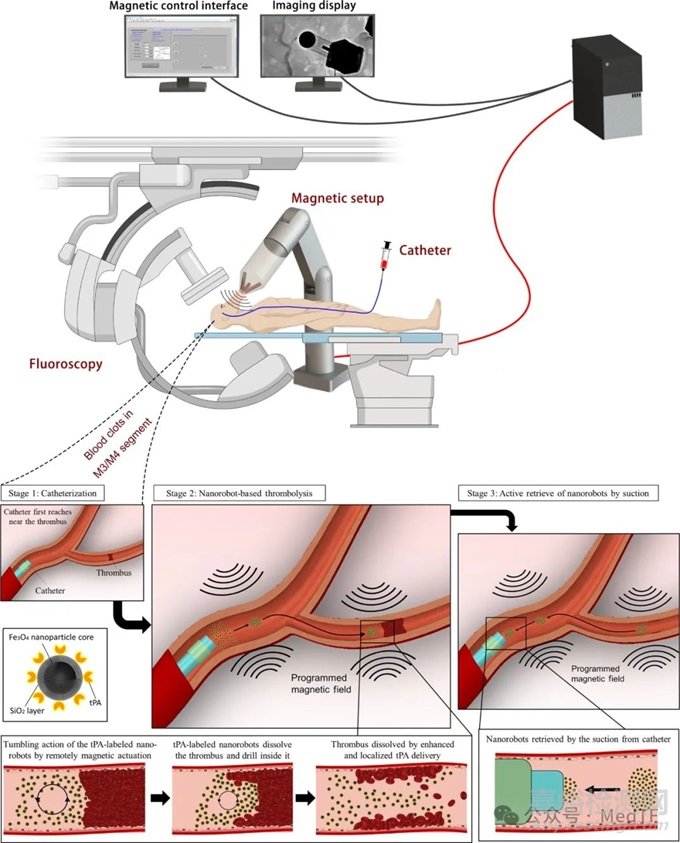
使用导管辅助磁控输送tPA-nbots,进行定向溶栓和原位召回的概念图
tPA-nbots的优点:
体积小,风险低:tPA-nbots的尺寸只有约300纳米,可在末梢血管中导航至血栓位置,定位输送tPA。精准局部施药的方法可防止高剂量的tPA在体内流动,降低出血风险。
速度快:虽然减少了剂量,但较传统治疗,tPA-nbots的溶栓速度快5至20倍,节省疏通血管时间,减少中风患者的脑损伤。
根据香港中文大学的研究团队介绍tPA-nbots早期临床前研究显示:
tPA-nbots能够通过磁驱动和荧光成像引导的实时跟踪,将tPA-nbots引导至亚毫米级段 (M3/M4) 的血栓部位。
通过机械作用和化学溶解提高血栓溶解效率,与纯tPA相比剂量减少约42倍,但溶栓率提高约20倍。
治疗后,tPA-nbots可以通过磁导航回球囊导管附近(即其尖端),并且80%的tPA-nbots可以被收集。
中大医学院影像及介入放射学系荣休讲座教授余俊豪教授指出:
“这个新治疗系统有望将纳米机械人经导管输送,并由体外磁场引导到末端血管或其他小血管内的血栓位置,弥补单纯倚靠导管的不足。
尽管在临床应用前仍有不少技术问题要解决,我相信我们正朝着正确的方向迈出重要一步。”
应用LSCI追踪、导航
为解决目前影像扫描技术对影像扫描尺寸、时间、空间解析度的限制,团队提出利用LSCI(激光散斑对比影像扫描)在血管内实时追踪、导航纳米机器人的活动。
通过LSCI,团队能在复杂的血管环境中监测、分析缺血性中风影响区域的血流状况、溶栓过程和血栓状态的变化,确保药物传输的效率和生物医学安全。
实时监测纳米机器人在血管内的活动,是证明其安全性和传输至准确位置的关键。
透过LSCI成功观察并追踪纳米机器人在血管模型、胎盘和小动物于静止或快速流动的血液环境中的活动,有助调整纳米机器人携带的激活剂数量、磁场应用的距离、强度和角度。
前景广阔
尽管在临床应用前仍有不少技术问题要解决,不过周毓浩创新医学技术中心研究助理教授陈启枫教授表示:
“我们所研发的tPA-nbots因其高精准靶向递送能力,大大减少治疗时间及溶栓治疗可能出现的副作用,提高治疗效率及安全,因此新技术有很大的临床应用潜力。”
关于tPA-nbots的研究团队
tPA-nbots研究团队主要成员包括(左起):
中大医学院影像及介入放射学系荣休讲座教授余俊豪教授;
中大机械与自动化工程学系教授张立教授;
中大医学院内科及药物治疗学系脑神经科助理教授叶耀明医生;
周毓浩创新医学技术中心研究助理教授陈启枫教授;
中大医学院内科及药物治疗学系利国伟脑神经学教授及脑神经科主任梁慧康教授。
此项研究获研究资助局、创新科技署、InnoHK创新香港研发平台的医疗机械人创新技术中心、周毓浩创新医学技术中心、香港中文大学–中国科学院深圳先进技术研究院机器人与智慧系统联合实验室, 以及中大天石机器人研究所支持开展。

来源:MedRobot


