您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2025-03-07 08:39
3月5日,美国约翰霍普金斯大学(JHU)的研究人员在《科学·进展》期刊发表文章 “A natural biomimetic prosthetic hand with neuromorphic tactile sensing for precise and compliant grasping”,受人类手指启发,该研究提出了一种天然的假肢手,结合了软体机器人的柔顺性和刚性机器人的强度,并嵌入了三层神经形态触觉传感系统,以模拟人类手部的感知和抓取能力。
创新性:采用刚性内骨骼+软体关节的混合结构,独立驱动的软体关节提高了假手的灵活性,使其能够适应多种抓握任务;三层触觉传感器,分别模拟Merkel 细胞、Meissner 小体、Ruffini 末端和 Pacinian 小体,实现对不同类型的触觉刺激(压力、振动、变形等)的感知;传感层的层次化设计,使假手能够区分不同物体表面纹理,例如粗糙、光滑、软硬等特性;假手在纹理识别测试中达到了98.38%的准确率,优于传统刚性假手(83.02%)和软体假手(82.31%)。
局限性:触觉传感器仅限于指尖,手掌和手指的其他部分没有嵌入传感系统,导致假手对整体抓取力和物体形状的感知不足;尽管混合结构提高了假手的抓取能力,但仍无法达到人手的精细力控水平,特别是在高强度握力任务(如开瓶盖、提重物)中表现有限;没有提供闭环反馈,用户在使用时无法获得触觉回馈,仍需依赖视觉进行抓取调整。
临床应用潜力:适用于上肢截肢患者,特别是需要更精细手部操作的患者(如抓握易碎物品、执行日常生活任务);适用于手部损伤患者的康复训练,通过触觉反馈提高神经可塑性,帮助患者恢复感觉;可用于机器人手,执行需要精细触觉感知的任务。
想象一下,当你伸出手去握住一个苹果,指尖轻柔地触碰到光滑的果皮,掌心感受到苹果的重量,微调抓握力道,防止果实滑落。这些看似简单的动作,对普通人而言是日常小事,但对于上肢截肢者或假肢佩戴者来说,却是一个巨大的挑战。传统的假手往往是刚硬的机械结构,缺乏真正的触觉感知能力,使用者只能依靠视觉判断如何抓握物体,难以精准控制力度。然而,一项最新的研究正在改变这一现状——JHU的科研人员开发出了一款具有神经形态触觉传感的仿生假手,不仅能“感觉”物体的表面纹理,还能像人类手一样兼顾柔顺性与抓取力,大幅提升假手的智能性和实用性。

图1 人手启发的具有神经形态触觉传感的混合机械手。
(A) 以人手为模型,仿生手结合了刚性和柔性假手的优点,同时增加了触觉传感和神经形态能力,可在非结构化环境中安全、灵巧地纵物体。(B) 刚性手,例如传统的假肢,提供精确和更高的抓取力,而 (C) 软手在与物体交互时提供柔韧性和安全性。(D) 触觉传感对于动态纵物体并与之交互是必要的。仿生指尖包含灵活的多层触觉感应,其灵感来自人类皮肤中的机械感受器。(E) 神经通信有效地向大脑发送大量空间和时间感觉信息。仿生手通过神经形态编码触觉传感信息来模拟神经的动态神经活动。
过去的假肢技术通常面临一个两难选择——刚性结构提供强大抓握力,却缺乏灵活性;软体结构则富有适应性,却难以施加足够的握力。因此,研究人员决定融合刚性与软性材料的优势,打造一种全新的混合假手。
他们设计的假手采用刚性内骨骼和软性关节相结合的结构,手指由3D打印的聚乳酸(PLA)材料组成骨架,而关节则由Dragon Skin 10 硅胶制造,具备一定的变形能力。这一结构的好处在于,刚性部分提供抓握力和稳定性,软性部分增强了手指的柔顺性,使其能适应不同形状和材质的物体。实验表明,相较于完全软体的假手,这种混合结构的假手不仅抓取力提升了三倍,而且在施加相同压力的情况下,能够提供更稳定的抓握控制。

图2 具有多层神经形态触觉感应的仿生手指
如果说混合结构提升了假手的“肌肉”,那么仿生触觉传感系统则赋予它“神经”。人类手指的触觉来源于皮肤中的四种主要机械感受器——Merkel 细胞、Meissner 小体、Ruffini 末端和 Pacinian 小体,它们分别负责感知压力、低频振动、皮肤拉伸和高频震动。而这款假手的指尖,正是模拟了人类的这套精妙系统,内置了三层触觉传感器:
外层传感器(表皮层):模仿 Merkel 细胞和 Meissner 小体,利用压阻式(piezoresistive)材料感知轻触和表面纹理。
中层传感器(真皮层):模仿 Ruffini 末端,采用压电式(piezoelectric)材料,检测假手在抓取过程中皮肤的形变和剪切力,帮助识别物体的柔软度。
内层传感器(深层真皮):模仿 Pacinian 小体,采用压电式(piezoelectric)材料,能对高频震动和瞬时压力做出快速反应,例如识别粗糙表面的微小震动。
通过这套仿生传感系统,假手能够像人类手一样,在握持不同物体时调整施力,并区分物体的表面纹理,为假肢佩戴者带来了更真实的触觉体验。

图3 传感层的神经形态反应
收集到触觉信号后,如何让假手“理解”这些信息呢?传统的假肢往往采用简单的模拟信号处理,而研究人员引入了一种更先进的方式——神经形态编码(Neuromorphic Encoding)。这种方法借鉴了人类神经系统的信号传递机制,通过Izhikevich 神经元模型,将传感器获取的触觉数据转换为脉冲信号(spike train),类似于生物神经元在处理外界刺激时的方式。
这一方法有两个显著优势:
减少计算负担:脉冲信号只在环境变化时触发,不需要持续传输大量数据,从而降低假手的能耗。
提高触觉识别精度:假手不仅能检测静态压力,还能分析时间序列中的动态变化,例如感知表面粗糙度或检测滑动趋势。
实验结果显示,基于这一神经形态编码系统,该假手在26种不同表面纹理的识别测试中,准确率高达98.38%,远超传统刚性假手(83.02%)和软体假手(82.31%)。此外,在日常物品识别实验中,假手成功区分了15种不同物品,分类准确率达到99.69%,显示出强大的环境适应能力。
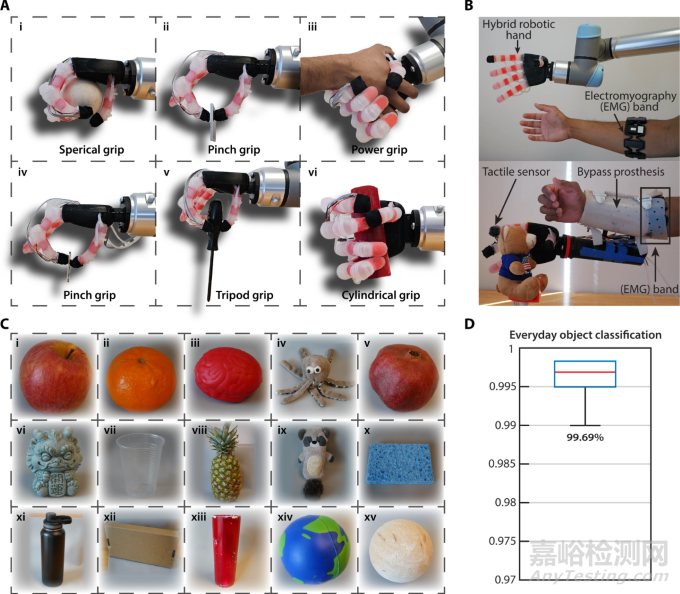
图4 仿生手抓取和识别物体功能
这项研究不仅是一次学术上的突破,也为假肢技术的未来发展指明了方向。随着该技术的成熟,在临床和工业领域的应用前景广阔:
1. 智能假肢:结合肌电(EMG)控制,让假肢佩戴者能够通过意念或肌肉信号控制假手,同时获得实时触觉反馈,大幅提升假肢的实用性。
2. 康复训练:为手部神经损伤患者提供真实触觉反馈,帮助他们重新建立手部感觉和运动控制能力。
3. 机器人应用:用于手术机器人、智能机械手臂、人机交互设备,提高机器人在复杂环境中的操作能力。
然而,目前的技术仍有一些局限性,例如假手的最大抓取力仍不及人手(仅为1.8N,而人手平均可达32±14N),并且触觉传感器尚未覆盖整个手掌,在某些应用场景下可能存在不足。因此,未来研究仍需优化材料和结构,提高抓取力,并结合闭环神经反馈技术,使假手真正具备“触觉感知”能力。
从冰冷的机械手臂,到能够“感觉”世界的仿生假手,这项研究标志着假肢技术正朝着更加智能、自然的方向发展。尽管距离真正媲美人手的假肢仍有一段距离,但可以预见,未来的仿生假手将不再只是工具,而是能够感知世界、与人类协作的智能伙伴。对于无数需要假肢的人来说,这项技术不仅是科技的突破,更是生活质量的希望。
文章链接:
https://www.science.org/doi/full/10.1126/sciadv.adr9300

来源:Internet


