您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2024-05-14 08:28
2024年5月9日,索尼公司宣布开发出一款新型显微手术机器人,能够自动更换手术器械并精准控制。
产品原型将于5月13日下午在横滨2024年电气电子工程师协会(IEEE)国际机器人与自动化会议(ICRA 2024) 上展出。
目前该款手术机器人仍处于研发当中,尚未获得日本监管机构的批准。
研发背景
在日本,老龄化导致劳动力减少,医务人员严重短缺,医疗领域人均工作量加大。
在对技术领域要求比较高的外科领域,使用手术机器人有望减少医生的工作量,同时普及先进的医疗技术。
传统的手术机器人往往面临无法自动更换手术器械、手术因此延迟或中断的问题。
索尼研发团队希望,能将显微外科手术技术与显微镜等结合,使得手术机器人能够对静脉和神经等极小的组织进行操作,并利用自动化技术实现手术机器人自行更换手术器械,节省医生精力,帮助手术顺利进行。
索尼显微手术机器人
主要组成部分:控制台、手术机器人。
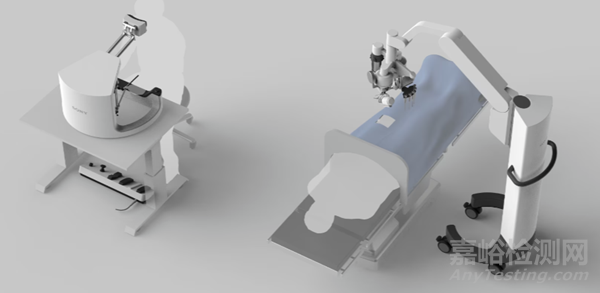
产品特点:
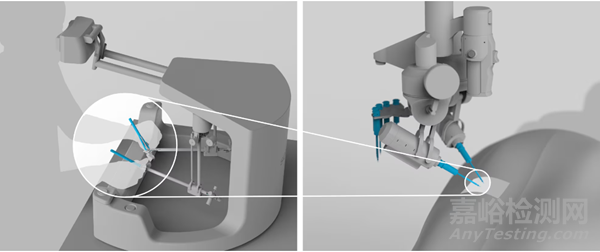
设计紧凑:手术机器人的机械臂能以比较小的动作连接、拆卸手术器械,无需人为干预,节省手术时间;
控制灵敏:索尼开发出了一种小型轻量控制装置,可清晰地捕捉到人指尖的细微动作;并且手术机器人的尖端设计使其能够像人的手腕一样平滑移动;
4K 高清:显微手术机器人将安装 4K 3D立体摄像头,并采用索尼开发的1.3英寸4K OLED 微型显示器,可清晰展示受影响区域和手术器械的操作,在视觉上支持医生的工作。

实验验证
2024年2月,使用该原型机的实验在爱知医科大学进行。
非专业显微外科的医生和医务人员在超显微外科领域 (针对直径为 0.3mm—0.8mm 的极细血管和神经的手术) 成功吻合动物血管,直径约0.6mm。

这是全球首例超显微外科领域可自动更换器械的手术辅助机器人实现血管吻合。
爱知医科大学解剖学系内藤宗和教授表示:
“即使熟练的医生也需要经年累月的培训才能掌握显微外科手术技术。在这项合作研究中,我们对索尼的手术辅助机器人进行了测试。
结果表明,缺乏经验的医生能够对动作进行出色的控制,使他们能够像专家一样熟练地执行复杂任务。我希望索尼的手术辅助机器人将带来一个扩展人类医生的能力的新时代。”
未来索尼计划与大学医学部和医疗机构合作,进一步开发、验证机器人手术辅助技术的有效性。
精密双边控制系统
2021年索尼已经研发精密双边控制系统,这是一种远程控制机器人技术,可以实现缩放10倍细节操作的同时保持人手的感觉。并将此技术应用到手术机器人当中。
视频源自索尼R&D官网
双边控制是指一种双向控制方法。原理是从主控设备向机器人发送运动指令,并且将机器人的信息反馈给主控设备。
这种系统能以10倍的比例来向操作者反馈实际力道。
比如,如果操作者将操纵杆移动10毫米,则机器人的尖端部分就会移动1毫米。如果机器人的尖端部分以1gf(克重,换算成牛顿则为0.0098N)的力碰触海绵,则会有10gf的力传递给操作者。
结语
手术机器人的力感知可作为力反馈的依据以提升手术的安全性。手术中的力感知包括受力感知和触觉柔顺感知两个方面,有外体感知和本体感知两种途径。
外体感知通常在手术工具的末端集成基于电阻、光纤等的力学传感器;
而本体感知则在手术机器人位于病人体外的驱动关节处安装传感器,通过力学模型推导手术工具末端所受的力学信息。
目前,直觉医疗 Intuitive 推出的达芬奇 5 在这方面获得的关注比较多。
达芬奇 5 首次引入力传感技术,可测量术中施加在组织上的微小力。
临床前研究结果表明,使用力反馈技术之后,施加在组织上的力降幅高达43%,对组织的创伤更小。

来源:MedRobot


