您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-05-23 21:45
前言导读
手术机器人是一种先进的医疗设备,借助微创伤手术及相关底层技术的发展而发明。手术机器人是医疗机器人的一种细分领域。手术机器人,即外科医生能够通过远程控制,并通过微小切口精密操作进入患者体内的手术器械,从而辅助外科医生进行微创手术的精密操作型机器人。
手术机器人被用于在高于人类能力的微创伤手术领域中实现高于人类能力的对手术器械的精准操控。手术机器人通常由手术控制台、配备机械臂的手术车及视像系统组成。外科医生坐在手术控制台,观看由放置在患者体内腔镜传输的手术区域三维影像,并操控机械臂的移动,以及该机械臂附带的手术器械及腔镜。机械臂模拟人类的手臂,为外科医生提供一系列模拟人体手腕的动作,同时过滤人手本身的震颤。
机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
市场分析
当前,随着人工智能、物联网等新科技的快速渗透,医疗健康正在与机器人全面融合,引领外科技术大变革。手术机器人行业迎来快速发展,赛道火热,备受资本青睐。
根据Frost & Sullivan的统计,2020 年全球机器人手术市场规模为 61 亿美元,预计从 2021 年到 2028 年将以 17.60% 的复合年增长率增长,到 2028 年将达到 222.7 亿美元(折合人民币约为1414亿元)。
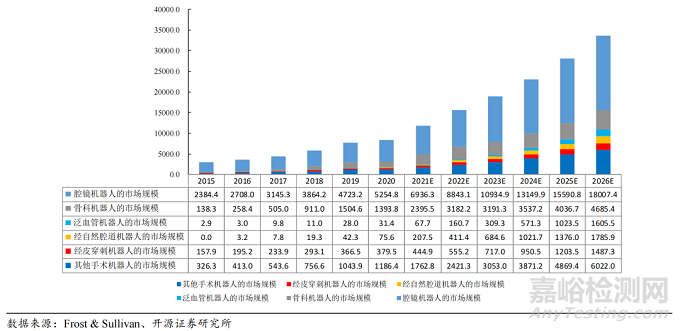
我国手术机器人市场发展迅猛,根据Frost & Sullivan的统计,市场规模由2016年的人民币853.6百万元增至2020年的人民币2,934.5百万元,年复合增长率达36.2%,预计2030年中国手术机器人的市场规模将达至人民币58,425.9百万元,年复合增长率为34.9%。
手术机器人是将机器人技术应用在医疗领域,显然的,机器人手术是使用机器人系统完成的外科手术类型,机器人辅助手术的开发旨在克服现有的微创手术程序的局限性,并增强外科医生进行开放手术的能力。
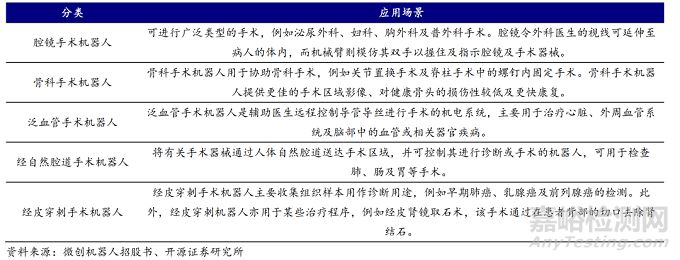
手术机器人集成了医学、材料学、自动控制学、数字图像处理学、生物力学、机器人学等诸多学科为一体的新型交叉科学。一般情况下,从临床医学应用角度可将手术机器人主要分为腔镜手术机器人、骨科手术机器人、泛血管手术机器人、 经自然腔道手术机器人、经皮穿刺手术机器人。
下面两幅附图分别给出了各主要细分手术机器人的应用场景和市场规模情况,供各位读者参考。
笔者认为,随着时间发展,对于国内手术机器人市场而言,各大厂商会面临如下5个方面的竞争,分别为:
1.技术战,入局者众多,内卷严重,而且在技术上目前国外先进巨头具有一定优势,国内厂家只有通过技术上“高人一等”才能“脱颖而出”。
2.临床战,目前手术机器人虽然种类繁多,但是依然是医械法规强监管的产业,且市场受众面以大城市的大医院为主体,在如此众多的品牌上市过程中,临床资源就显得弥足珍贵。
3.融资战,手术机器人是一个多学科高度集中的产品,研发周期长,临床要求高,各方面人力资源也紧张稀缺,必然需要高额的投入,这些都需要大量的资本投入,因此手术机器人的玩法从资本市场来讲其实就是“谁的资本强谁成功率大”。
4.营销战,随着国内、国外厂商的产品逐步上市,需要“卖出去”,也需要市场各群体的认同,更需要占据市场率,因此在众多同类型同适应症的手术机器人中“卖得好”才是各大厂商的终极目标,才是“长久之计”。
5.专利战,专利对于手术机器人而言十分重要,当然也是技术层面的演化,更是各大手术机器人厂商市场角力的重要武器,甚至是“终极核武”,规避设计风险、占据市场率都需要专利的辅助,达芬奇在腔镜机器人领域“叱咤风云”恰恰是得益于专利。
美敦力Hugo 初探
2019年9月,美敦力发布首台HUGO RAS手术机器人,正式加入软组织手术机器人领域竞争,被认为是达芬奇“最危险”的竞争者。
Hugo外科系统是一种机器人辅助手术设备,旨在泌尿外科、妇科和普外科腹腔镜手术过程中帮助精确控制其手术器械。
Hugo RAS 系统一个模块化的多象限平台,专为广泛的软组织手术而设计。美敦力推出的手术机器人系统使用模块化的解决方案,重点克服手术机器人成本和应用的障碍。Hugo RAS系统包括手术塔、控制台、手术手臂和机械手推车。
2021年10月11日,美敦力宣布其Hugo机器人辅助手术(RAS)系统已获得欧盟CE认证,这是美敦力在软组织手术机器人市场上的又一里程碑式进展。
专利分析
笔者针对美敦力Hugo机器人所涉及的专利情况,进行了检索,其结果进行如下展示:
技术概览
Hugo RAS主要有以下多个特点:
Hugo RAS是一个模块化系统,也就是说它有多个独立组件可以适应特定患者或医院病床的需求,并且可以随着技术的发展而升级。Hugo RAS配有四个装在推车上的手术臂,这具有极大的灵活性。比如说,医生可以在使用手臂完成手术后,将其推开,然后仍然使用同一个手术台开始腹腔镜手术。手术后,医院工作人员可以将系统松解,然后将其滚动到另一个经过消毒并准备好的手术室中,以便医生可以在休息后迅速开始新的手术。
美敦力将Karl Storz的三维视觉系统和可视化组件整合到了Hugo RAS中。Hugo RAS的手术塔装有Storz可视化系统,随附的内窥镜也是标准长度,这意味着它可以从机器人系统上取下,并在腹腔镜手术过程中用作手持设备。手术塔还装有美敦力的FT10发生器,该发生器专门设计用于为机器人手术中发射能量的设备提供动力,还可以为腹腔镜和开放式手术设备提供动力。具有通用性的特征。
美敦力针对Hugo RAS手术机器人开发了一个系统,该系统会随着技术的发展及时进行升级,而无需医院更换整个系统。对于集成到控制台中的可视化技术而言,这尤其重要。Hugo外科手术控制台的设计具有带脚踏板的开放式结构,因此医生在手术过程中仍可与患者人员互动。
专利概览
笔者对Hugo手术机器人和配套器械的相关专利根据类别分别进行了整理和剖析,这里笔者从众多专利中选择了若干进行了解析,相关相关结果如下:Hugo手术机器人的完整专利清单和报告笔者也汇总完成,如若获取完整专利清单和报告可以与笔者取得联系,共同交流学习:
1
|
公开/公告号 |
US10779897B2 |
申请日 |
2016-06-20 |
|
发明名称 |
Robotic surgical assemblies |
||
|
解决的技术问题 |
The cables in the surgical instruments were prone to stretch during use. The stretching could cause end effector movement to lag that of the input device based on the amount of stretch. As a result, the surgical instrument and end effector may appear to move in a less correlated manner, which would limit the responsive performance of the robotic system. |
||
|
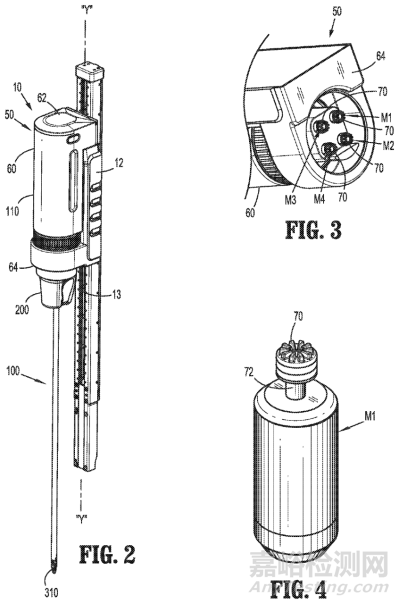
技术方案 |
A surgical instrument for use with and for selective connection to an instrument drive unit includes an end effector, an instrument drive connector including a plurality of drive assemblies, and a plurality of drive members in mechanical cooperation with the instrument drive connector and the end effector. Each drive assembly of the plurality of drive assemblies includes a drive screw including an elongated threaded body and a drive nut threadedly engaged with the elongated threaded body of the drive screw such that rotation of the drive screw results in longitudinal movement of the drive nut. Each drive member of the plurality of drive members includes a proximal end portion secured to a respective drive nut of one of the plurality of drive assemblies such that longitudinal translation of the respective drive nut causes longitudinal translation of the drive member to drive a function of the end effector. |
||
|
相关附图 |
|
||
2
|
公开/公告号 |
US9937626B2 |
申请日 |
2014-10-20 |
|
发明名称 |
Wrist and jaw assemblies for robotic surgical systems |
||
|
解决的技术问题 |
There is a need for surgical tools having small cross-sectional areas that are able to provide high forces between end effector jaws, including customizable forces that vary depending on the position of the jaws in relation to each other. |
||
|
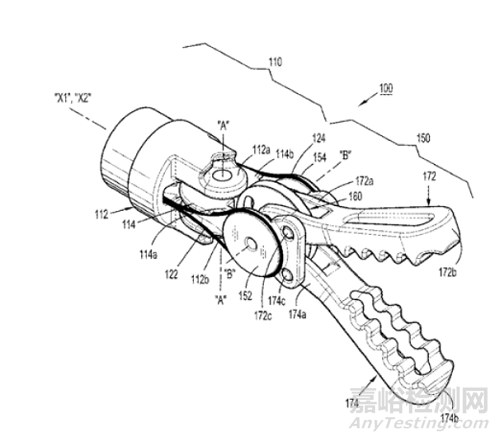
技术方案 |
An end effector for use and connection to a robot arm of a robotic surgical system, wherein the end effector is controlled and/or articulated by at least one cable extending from a respective motor of a control device of the robot surgical system, is provided. The end effector includes a wrist assembly, and a jaw assembly. The jaw assembly includes a cam pulley rotatably supported on at least one support plate of the jaw assembly, wherein the cam pulley is operatively connected to a proximal end of each of the jaws of the jaw assembly such that rotation of the cam pulley results in one of an opening and closing of the jaw assembly. |
||
|
相关附图 |
|
||
结 语
诚如领域内人士共同认识的那样,手术机器人逐渐赢得市场追捧,站上了智能精细化发展、医保政策利好的快车道,全球以及国内各大手术机器人厂商也必会将达芬奇、美敦力机器人作为重要的标杆和对照,联动产学研医生多方力量,不断创新,推动中国手术机器人行业更智能化、精准化、微创化的发展,相关知识产权问题也必将会成为各大手术机器人厂商的研究重点课题,后续相关产品的的研发和专利事务值得持续关注。
需要特别说明的是,对于手术机器人,笔者对国内外各大厂家均进行了详细研读和分析,形成了卓有成效的工作成果,感兴趣的读者可与笔者取得联系,共同交流学习。

来源:医械知识产权