您当前的位置:检测资讯 > 热点事件
嘉峪检测网 2022-07-02 09:19
心脑血管领域介入机器人正在国内外如火如荼开展研究,目前这个领域以西门子的CorPath为代表。
心脑血管领域介入机器人如此受到行业追捧是由于其可以解决减少(或者避免)术者吃线。医生吃线过多,总是会引起各种各样的副作用:
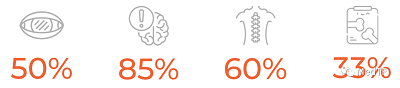
50%的介入医生显示明显的后囊下晶状体改变,是白内障的前兆
85%介入医生自我报告的脑肿瘤中,有1例起源于头部左侧,即距离放射源最近的区域
60%介入医生有后脊柱问题,因穿着高辐射防护服
33%介入医生因骨科问题导致缺勤
当然以当前的技术,CorPath为代表心脑血管领域介入机器人只能解决以下简单的血管介入手术,例如简单PCI手术。对于复杂的心脑血管介入手术,它们就无能为力。尽管在简单放放支架、球囊,CorPath们已经可以完成。但是一点血管过于曲折或者有严重堵塞时,CorPath们立马就无能为力,还是需要经验丰富的术者亲自手动操作。
为了让介入机器人能够解决更多临床问题,韩国研究团队一款电磁可控介入机器人,让机器人能够在磁场引导下完成高难度PCI手术,例如CTO手术。
对于电磁可控介入机器人在韩国团队开发之前,已有多个研究团队在开发。例如麻省理工(MIT)的研究团队研发磁场引导的神经介入机器人。

但是目前的磁场引导的介入机器人通常体积庞大,响应速度慢,导致电磁可控介入机器人只能在实验室,而无法商业化。
韩国大邱庆博科学技术研究所研究团队希望通过新技术来改变电磁可控介入机器人现状,让其有商业化可能。
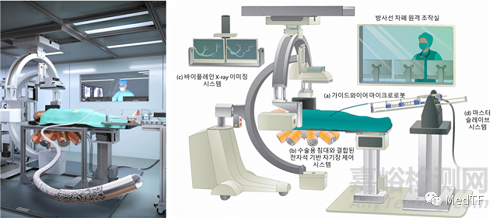
韩国大邱庆博科学技术研究所研究团队开发了一个新的电磁可控微型介入机器人( ECMIS)。 ECMIS可帮助医生实时远程操纵和控制微直径导丝。 ECMIS 包括能够在低强度磁场下进行主动磁转向的微型机器人导丝、人体尺度电磁驱动 (EMA) 系统、双平面 X 射线成像系统和远程导丝/导管推进器单元。所提出的 ECMIS 通过在 EMA 下精确快速地控制微型机器人导丝,对血管模型的有针对性的实时心血管干预。的辐射暴露下优化操作介入设备,例如导丝。
该磁场由人体尺度电磁驱动 (EMA) 系统产生,人体尺度电磁驱动 (EMA) 系统由在手术床下以半球形配置排列的八个电磁铁组成。将患者放在床上,将导丝插入动脉,并通过改变磁场进行远程引导。
微型机器人导丝由生物相容性俱佳的硅胶管制成,可以在血管中移动,表面摩擦很小。硅胶管内装有用于磁转向的钕铁硼永磁体和硬磁复合材料。
韩国大邱庆博科学技术研究所已经在进行ECMIS验证:
研究团队首先使用2D和3D打印血管模型测试了磁可控介入机器人。
然后通过对体内猪模型的冠状动脉、髂动脉和肾动脉的临床前研究,研究了 ECMIS 对实时心血管干预的潜在临床有效性,其中微型机器人导丝的磁性转向和其他 ECMIS 模块的控制是远程操作的由操作员在带有 X 射线屏蔽的单独控制室中进行。
研究团队评价:
“我们提出的电磁可控微机器人介入系统(ECMIS)可以通过使医生能够在使用低强度磁场的X射线屏蔽控制室中远程进行手术,从而减少医生的辐射暴露。它也不需要进行常规PCI所需的高水平培训。”

来源:MedTF


