您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-09-16 11:03
他叫王添路,本科毕业于哈尔滨工业大学,随后前往瑞士苏黎世联邦理工大学读研。目前,王添路在硕士同校以及马克斯普朗克智能系统所读博,预计今年年末毕业。师从世界著名微小尺度机器人先驱梅廷·西蒂教授。
近日,他和所在课题组利用无线磁控的软体机器人,针对在微创手术中导丝或导管很难达到远端血管执行治疗的问题,提供了一种可靠的解决方案。
在临床手术中,基于导丝、导管的微创手术方案,已经体现出非常明显的优势,例如更小的创面、更快的愈合时间、更小的术后感染率和术后并发症几率等。
这种手术方案已被用于心血管、脑血管、以及外周血管的疾病治疗,例如局部药物递送、支架植入、血管成形和血管栓塞等。
在手术进行时,医生要将一根细而长的导管,从上肢或下肢通过切口送入人体,并在 X 光成像下经过动脉系统,将导管递送到目标位置。
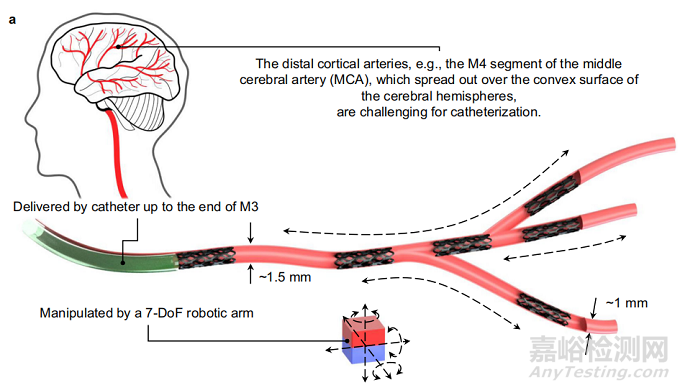
然而,位于远端的血管例如位于大脑外侧的大脑中动脉的皮层支,因其更远的递送距离、更大的曲折度、以及更薄的血管壁构成,导致当下依然很难凭借导丝、或导管实现有效的触达。
如果强行送入,会造成血管破裂等严重并发症。与此同时,远端动脉附近有很多危及生命的疾病,例如脑瘤、血管瘤、血管堵塞、动静脉畸形等。
其中,最为恶性的脑瘤一般都存在于该区域。因此,一种能有效、顺利地到达远端区域,并执行医疗功能的设备是非常必要的。
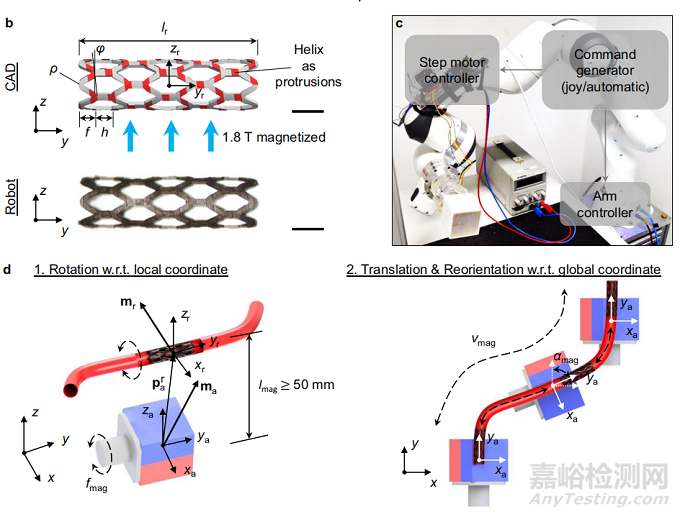
为此,该团队基于磁控软体机器的优越性,例如无线驱动的特性、以及与人体交互的安全性,设计了毫米尺度的支架状软体医疗设备——Stentbot。
(来源:Nature Communications)
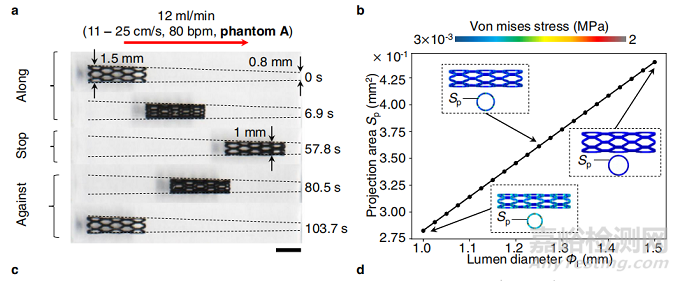
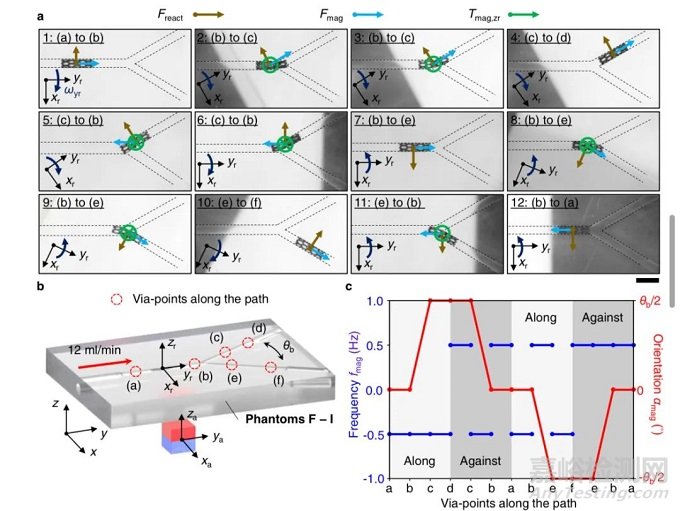
研究中,课题组利用外部三维磁场控制,即通过机械臂的空间运动与末端旋转的永磁铁、以及支架状的特殊设计,让 Stentbot 能在不同直径的管腔下,进行自适应的形状变化,从而可以顺流于或逆流于脉动流有效运动。此外,其还能被精准控制,从而具备通过分支、以及弯曲路径的能力。
逆流运动的重要性在于,当医疗功能执行完毕后,这款软体医疗设备可以离开目标区域,进而被予以回收。更重要的是,Stentbot 的自适应变形实现了其在高速管流下的“自锁”能力。即使外部磁场撤离,Stentbot 也能锚定在局部位置执行医疗功能。
在体外动物器官实验中,该设备的运动能力已经得到证实。在已有运动能力系统实验和理论建模的基础上,该团队已经实现如下两种医疗功能:分别是用于治疗血栓的局部药物递送、以及用于治疗血管瘤的血液分流。相关实验,也证明了这些功能的可行性。
(来源:Nature Communications)
近日,相关论文以《自适应无线微型机器人运动进入远端脉管系统》为题,发表在 Nature Communications 上。
王添路担任第一作者,马克斯普朗克智能系统研究所物理智能部胡文琪博士以及梅廷·西蒂教授担任共同通讯作者。评审专家认为,此次基于小尺度磁控设备的治疗方法,具备很高的创新性与前景。
在立项之初,课题组的目标在于利用小尺度磁控软体医疗机器人/设备,来解决一些实际性临床问题。王添路表示:“我们课题组的交叉学科氛围,为此次项目提供了很好的契机。通过与组内具备生物医疗背景的同事、以及和合作医院医生的交流,我们很快确定了研究方向——即面向远端血管做探索。”
随后,针对目标区域的生理特征与需求,例如适用区域的血管的管径大小、流量情况、几何形状等,该团队开始进行相关设计,最终确定了毫米级别软体医疗设备的形式。
基于这种形式,他们又设计出三维空间内的无线磁驱方案。针对这些方案,课题组先是在一些由聚合物制成的医疗假体系统中进行测试,并在动物体外器官中确认。
接下来,其又根据实验现象开展理论建模与分析,借此探索该设备在特种环境下的运动机理与功能机理,后又对设备做了进一步迭代。此次成果的目标与主要应用前景在于:进入远端血管并用于治疗多种潜在疾病,例如血栓、血管瘤、脑瘤等。
(来源:Nature Communications)
王添路表示:“我们的软体设备设计、以及整体的机器人磁控系统设计,均面向上述目标。基于当前工作,我们已经提交了两份专利申请。期待在不久的将来,能将这项技术进行成果转化。”
同时,他还表示自己所在的课题组,目前的一个大方向是打造面向医疗应用的小尺度磁控软体机器人。
“为此,我们时常要和来自医院的合作者交流。期间我发现面对同样的科学问题和实验现象,不同领域的人会有不同的解读。比如,在评估每一款新兴医疗产品时,真正临床操作的医生会更倾向于用概率的方式去衡量,并会考虑病人的个体差异,讲究具体情况、具体分析。”王添路说。
(来源:Nature Communications)
而他和同事作为科研人员,更多会在一个广泛的范围内,来说明当前成果相比之前的优越性。总而言之,在跨学科交叉的大背景下,对研究方向分别做以具体和广泛的讨论,可以激发更多新想法。
目前,王添路正和同事开展后续工作,主要目标之一在于:在更真实的环境中,测试本套系统的可行性与优越性。
参考资料:
1.Wang, T., Ugurlu, H., Yan, Y. et al. Adaptive wireless millirobotic locomotion into distal vasculature. Nat Commun 13, 4465 (2022). https://doi.org/10.1038/s41467-022-32059-9

来源:DeepTech深科技


