您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2019-11-14 10:06
仿生材料指模仿生物的各种特点或特性而开发的材料。仿生材料将材料科学、生命科学、仿生学相结合, 对于推动材料科学的发展具有重大意义。仿生设计不仅要模拟生物对象的结构, 更要模拟其功能,才能达到这类材料的设计初衷。这篇文章总结了在过去的一年中仿生材料的重要研究进展,以供大家参考。
01 Science: A bioinspired flexible organic artificial afferent nerve[1]
体感系统中的受体,神经元和突触的分布式网络有效地处理了复杂的触觉信息。斯坦福大学的Zhenan Bao教授等人使用了灵活的有机电子器件来模仿感觉神经的功能。并且对于人工传入神经从压力传感器集群中收集压力(1-80Kpa)信息进行了深入探究,通过使用环形振荡器(0-100Hz)将压力信息转换为动作电位,并将多个环形振荡器的动作电位与突触晶体管整合在一起。仿生分层结构可以检测对象的移动,组合同时的压力输入并区分盲文字符。此外,将人工传入神经与运动神经相连,以构建混合生物电子反射弧来激活肌肉,这种系统在神经机器人和神经修复中有潜在的应用。
02 Science: Bioinspired improvement of laminated glass[2]
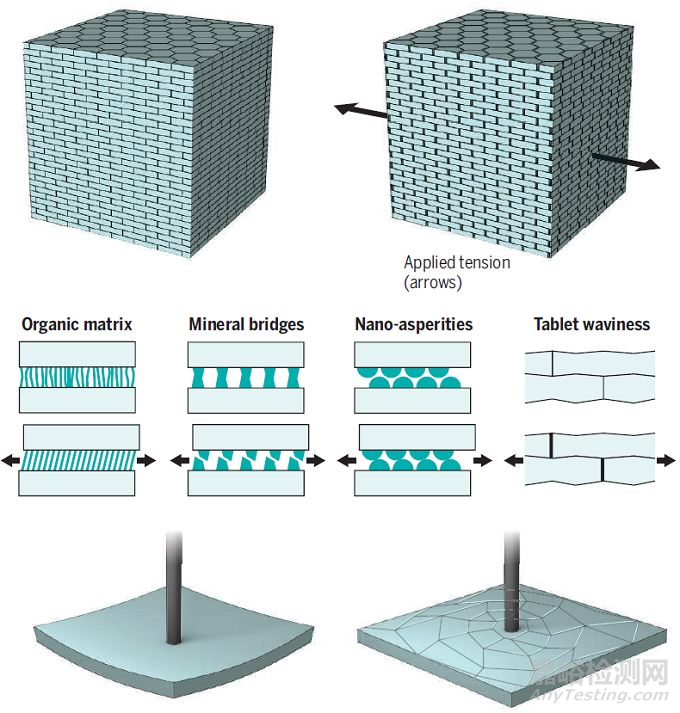
玻璃具有独特的光学,热,机械,化学和电学性质,可用于许多应用领域中。但是,玻璃固有的脆性可能破坏会用玻璃组成的结构从而限制其在承重应用中的使用(例如大型公共结构)。当综合的机械和环境负荷使玻璃处于张力下并引发突然的灾难性故障时,先前存在的表面缺陷会扩散。在结构应用中,夹层玻璃(即两个或两个以上的玻璃板与薄的聚合物中间层粘合在一起)用于在意外破裂的情况下保留碎片。因为碎片会相互锁住,破裂的夹层玻璃不仅可以维护用户安全,还可以部分保留故障单元的刚度和结构完整性。诺丁汉大学的Kyriaki Corinna Datsiou等人提出了一种生物启发的玻璃-聚合物复合材料,该复合材料具有比层压玻璃更高的损伤耐受性,再次证明自然可以成为材料技术改进的灵感源泉。
03 PNAS: Biohybrid valveless pump-bot powered by engineered skeletal muscle[3]
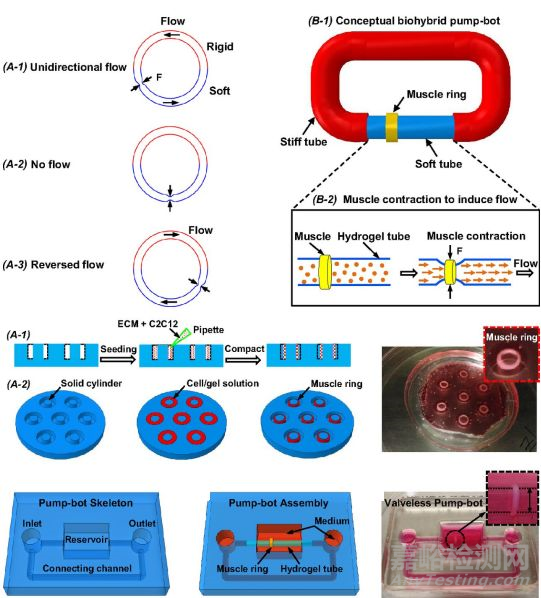
泵是所有动物至关重要的生命维持组件。在生命的最早阶段,管状胚胎心脏就像无阀泵一样,能够产生单向血流。受此启发,哈弗大学Zhengwei Li等人首次开发了一个由工程骨骼肌提供动力的无生物混合阀的无泵机器人。泵浦机器人由一个柔软的水凝胶管组成,该软管的两端连接到一个较硬的聚二甲基硅氧烷(PDMS)支架上,从而产生了阻抗失配。自发性或电刺激的循环肌肉收缩进一步挤压管,导致弹性波沿着软管传播并在软/硬管边界处反射回去。本泵机器人可实现高达22.5μL/ min的流速,比类似尺寸的心肌细胞瓣膜泵的流速至少高三个数量级。由于其简单的几何形状,坚固性,易于制造和高泵送性能,这种泵浦机器人特别适合微流控,药物输送,生物医学设备,心血管泵送系统等方面的广泛生物医学应用。
04 Nature: Controlling organization and forces in active matter through optically defined boundaries[4]
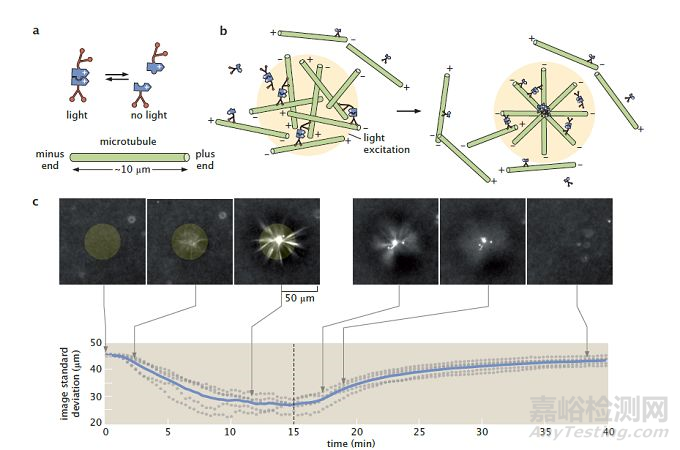
生命系统能够移动,重新配置和复制。为了执行这些任务,细胞会协调产生“活性”分子的相互作用,这些分子可以形成跨度达毫米级的力场并操纵不平衡结构。由于,这些实验系统缺乏在细胞中发现的时空控制,限制了它们在研究非平衡现象和生物启发工程方面的实用性。在这里,加州理工大学的Tyler D. Ross等人通过光学控制结构和结构来发现非平衡现象和原理。工程系统由纯化的微管和可交联并组织微管的可光激活的运动蛋白组成照成不同的结构我们开发定义为灯光模式集的基本操作,以创建,移动和合并微管结构。通过构成这些基本操作,能够创建跨过数百微米的微管网络,并以比单个电动机的速度快一个数量级的速度收缩。操纵这些可收缩的网络来生成和雕刻持久的流体流,揭示的边界介导控制原理可用于研究新兴的细胞结构和作用力以及开发可编程的活性物质装置。
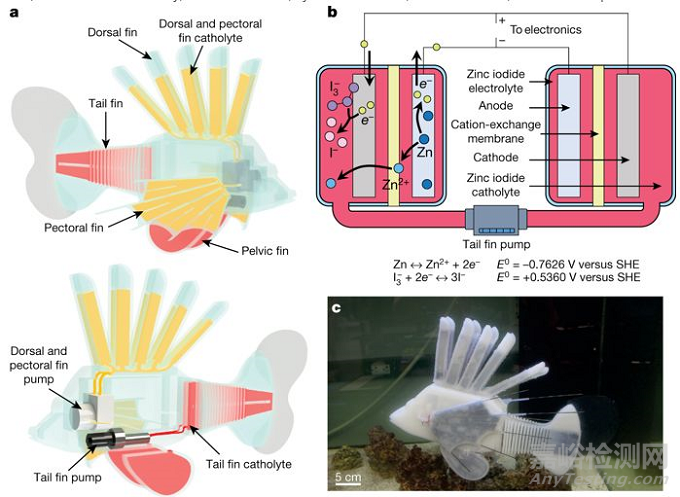
05 Nature: Electrolytic vascular systems for energy-dense robots[5]
现代机器人缺少活生物体中的多功能互连系统,因此无法再现其效率和自主性。储能系统是限制机器人自主性的最关键限制,但是可以在多功能,受生物启发的应用环境中重新检查其大小,重量,材料和设计约束。这篇文章中,康奈尔大学的Cameron A. Aubin等人介绍了一种嵌入到无绳水生软机器人中的合成能量密集循环系统。该仿生血管系统以氧化还原液流电池为模型,将液压传递,致动和能量存储的功能整合到单个集成设计中,从而在几何上增加了机器人的能量密度,可实现长时间(长达36小时)的操作。其构造中使用的制造技术和柔性材料使血管系统能够以复杂的形状因数创建,这些形状因机器人的运动而不断变形。液压流体中电化学能量存储的这种使用可以促进未来机器人设计中能量密度,自主性,效率和多功能性的提高。
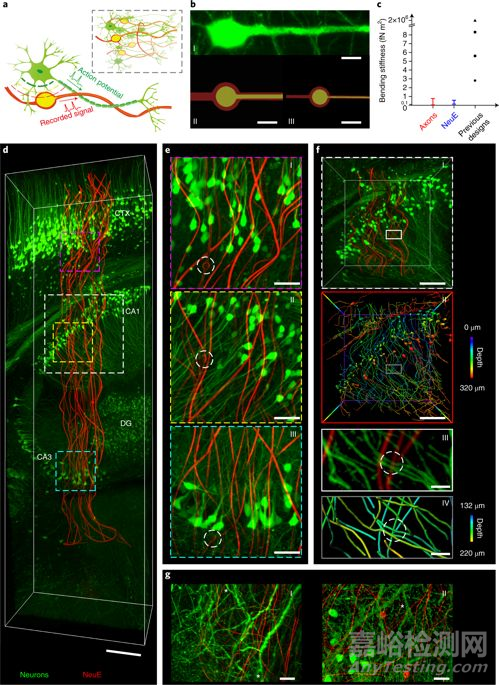
06 Nat.Mater.: Bioinspired neuron-like electronics[6]
作为功能性生物材料的重要应用,神经探针为研究大脑做出了重要贡献。尽管前几代探针与其神经元靶标在结构和机械方面存在差异,导致神经元丢失,神经炎性反应和测量不稳定,但生物启发和仿生策略已开始应用于神经探针的开发。哈佛大学的Xiao Yang等人介绍了一种针对神经探针的生物启发性设计-类神经元电子(NeuE)-其中的关键构件模拟了神经元的亚细胞结构特征和机械特性。植入的NeuE-脑接口的完整三维映射突出了NeuE和神经元的结构不可区分性和紧密的互穿性。时间依赖性的组织学和电生理学研究进一步揭示了植入后不久与神经元和神经胶质网络的结构和功能稳定的接口,从而为下一代脑机接口提供了机会。NeuE亚细胞结构特征显示出促进内源性神经祖细胞的迁移,从而有望成为无移植再生医学的电活性平台。
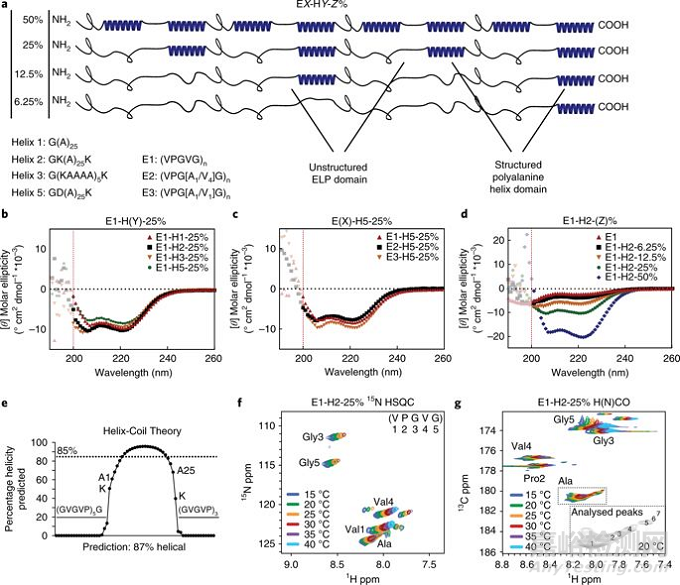
07 Nat.Mater.: Injectable tissue integrating networks from recombinant polypeptides with tunable order[7]
天然生物材料的新兴特性来自有序域和无序域之间纳米级相互作用的共同作用。在这里,使用重组序列设计,我们创建了一组部分有序的多肽,以通过精确编码纳米级有序-无序相互作用来研究新兴的层次结构。这些材料结合了无序的弹性蛋白样多肽的刺激响应能力和聚丙氨酸螺旋的结构稳定性,对热响应具有可调的热滞,并具有在阈值温度以上可逆地形成多孔,粘弹性网络的能力。通过粗粒度模拟,我们表明,由于有序域和无序域的介观相分离,物理交联引起了磁滞现象。注射设计为在体温下转变的部分有序多肽后,它们会形成稳定的多孔支架,该支架可迅速整合到周围组织中,而炎症反应极少,血管形成程度很高。结构顺序和无序的序列水平调节是功能性基于蛋白质的生物材料设计的未开发原理。
08 Chem.Rev.: Organic Bioelectronics: Bridging the Signaling Gap between Biology and Technology[8]
我们日常生活中的电子设备几乎完全依赖电子作为主要的电荷载体。与之形成鲜明对比的是,生物系统很以电子作为电荷载体,而是使用离子和大小不同的分子。近几十年来,由于导电和半导电聚合物和有机小分子能够进行独特的电子和离子/分子结合导电,这些材料已成为在这两个领域之间转换信号的出色工具。因此林雪平大学的Daniel T. Simon等人提供了一种有效接口的手段生物学与常规电子学,从而成为有机生物电子学领域。如今,有机生物电子学首次发现和定义了具有生物记录和调节工具的通用平台,并且正朝着从生命科学到临床的应用不断发展。在本综述介绍了该领域从其早期的突破到当前的成果和未来的挑战等方面的内容。
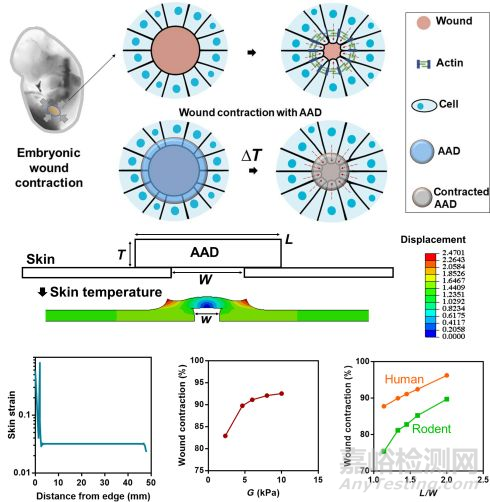
09 Sci.Adv.: Bioinspired mechanically active adhesive dressings to accelerate wound closure[9]
受胚胎伤口闭合的启发,哈弗大学的S. O. Blacklow等人提出使用机械活性敷料来加速伤口愈合。常规敷料通过在伤口部位保持水分来被动地帮助愈合,而最新的进展集中在驱动愈合过程的药物传递和细胞上,但是这些方法通常由于药物副作用,复杂的制造方法和高成本而变得复杂。在这里,研究者们介绍了由热响应性强粘性水凝胶组成的新型活性粘合剂敷料,这些凝胶结合了高拉伸性,韧性,组织粘附力和抗菌功能。根据暴露于皮肤温度,它们牢固地粘附在皮肤上并主动收缩伤口。体外和体内研究证明了它们在加速和支持皮肤伤口愈合方面的功效。有限元模型验证和完善了由这些活性粘合剂敷料实现的伤口收缩过程。这种机械生物学方法为伤口处理开辟了新途径,并可能在从再生医学到软机器人的各种应用中找到广泛的用途。
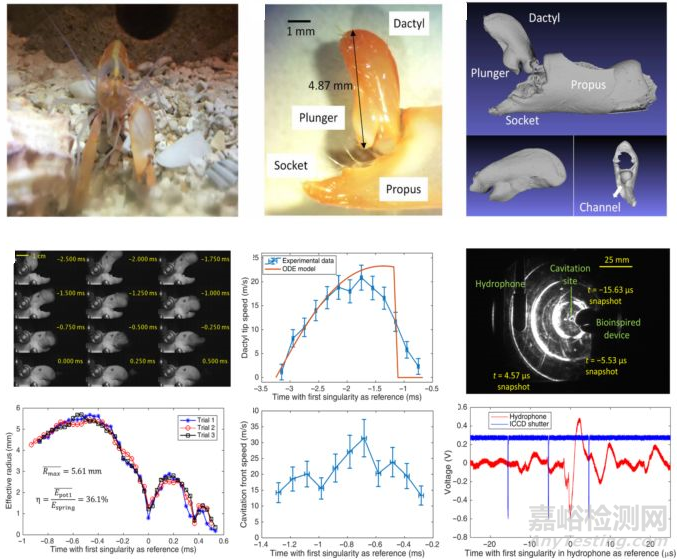
10 Sci.Adv.: Bioinspired mechanical device generates plasma in water via cavitation[10]
大自然可以比人类设计的电,声或光设备在液体中产生等离子体的效率更高。在动物界,卡塔虾会诱使空化塌陷,从而产生高压和高温,从而导致通过光子的有效等离子体形成以及通过能量聚焦产生冲击波。在这项工作中,德州农工大学的Xin Tang 和David Staack报告了一种仿生机械装置,模仿了卡塔虾的血浆生成技术。该设备是基于快速拍打的虾爪蜕的X射线计算机断层摄影术采用仿生材制造技术制造的。研究者们设计了一种弹簧装置,以适当的力和速度致动机械爪,以产生与虾的空化数和雷诺数相匹配的高速水射流。对光发射和冲击进行了成像,这表明我们的设备复制了虾的血浆生成技术,并且比其他血浆生成方法更有效。
参考文献
[1] Yeongin Kim, Alex Chortos, Wentao Xu. A bioinspired flexible organicartificial afferent nerve. Science, 2018, 360, 998–1003.
[2] Kyriaki Corinna Datsiou. Bioinspired improvement of laminated glass. Science. 364, 1232-1233.
[3] Zhengwei Li, Yongbeom Seo, Onur Aydin. Biohybrid valveless pump-bot powered by engineered skeletal muscle. PNAS, 2019,116, 1543-1548.
[4] Tyler D. Ross, Heun Jin Lee, Zijie Qu.Controlling Organization and Forces in Active MatterThrough Optically-Defined Boundaries. Nature, 2018, 504456.
[5] Cameron A. Aubin, Snehashis Choudhury, Rhiannon Jerch. Electrolytic vascular systems for energy-dense robots. Nature, 2019,571, 51–57.
[6] Xiao Yang, Tao Zhou, Theodore J. Zwang. Bioinspired neuron-like electronics. Nat.Mater. 2019, 18, 510–517.
[7] Stefan Roberts, Tyler S. Harmon, Jeffrey L. Schaal. Injectable tissue integrating networks from recombinant polypeptides with tunable order. Nat.Mater. 2018, 17, 1154–1163.
[8] Daniel T. Simon,Erik O. Gabrielsson, Klas Tybrandt. Organic Bioelectronics: Bridging the Signaling Gap between Biology and Technology. Rev. 2016, 116, 13009−13041.
[9] O. Blacklow, J. Li, B. R. Freedman. Bioinspired mechanically active adhesive dressings toaccelerate wound closure. Sci. Adv. 2019, 5, 3963.
[10] Xin Tang and David Staack. Bioinspired mechanical device generates plasma in water via cavitation. Sci. Adv. 2019, 5, 7765.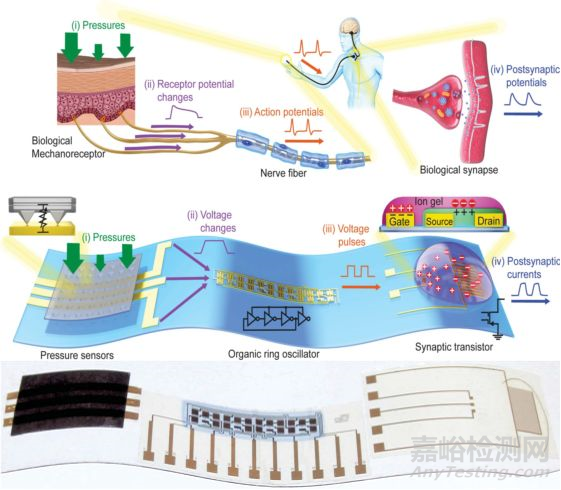

来源:怪ayi材料人


