您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2022-05-18 13:40
简介
本文描述了达芬奇手术机器人在直观手术公司早期到2009年发展的历程。同时本文也做了一个关于远程手术起源的总结,包括独特的技术趋势和临床需求,同时介绍了那些深刻的理解机器人和远程技术并将其应用在医疗的先驱们。在这一章节我们描述了一些重要的设备规则影响,并且描述了它们是如何影响了医疗设备的发展。不过需要指明的是,这些观点都来自直观手术公司而且描述的不够详细,但是无论如何,我们希望这些观点能够针对技术和医疗的发展和创新提供一些观点,最终来造福人类。
远程手术的起源
远程手术由两个非常不同的技术组合交叉而来,实现了一种完全创新的微创手术。第一个技术来源于1940年的“遥操作”,Robert A. Heinlein在1942年写了一篇名为“Waldo”短片科幻小说,描述了一个生来柔弱(无法站立的)的Waldo Farthingwaite-Jones可以使用自己的手和手指来操作一个线控的手套,去控制一个强有力的机械臂。在不久之前一种名为“waldoes”的远程操作器被设计用来操作危险的放射性材料。这些设备用丝绳驱动关节,允许操作者站在安全的玻璃后面操作危险的材料。20世界50年代,Raymond Goertz和他的同事研究了可以在更远的距离操作的远程操作器,他们使用电动的传感器和驱动器来替换了机械结构,这样允许操作者和“从手”物理距离很远,这样就大大扩展了遥操作的用途。
在医疗领域,内窥镜的应用想法最早可以追溯到一个叫做Albukasim (936–1013 A.D.)的阿拉伯医生,然而,直到19世纪Phillip Bozzini才发明了一些能够观察到活着的人体内部的实用方法,他使用了一个他命名为“Lichtleiter”的光引导的器械来观察泌尿系统、直肠和咽喉,内窥镜类的设备一直发展到1980年左右,CCD和视频设备的出现引发了这一领域的革命,并产生了微创伤的腹腔镜技术,标志性事件是1987年French physician Mouret完成了第一例腹腔镜胆囊切除术。
在远程微创手术机器人出现之前,还有一些其他技术关键点出现。远程操作技术在操作危险材料、深海探测、太空探测的应用中得到进一步发展,20世纪80年代,微电子学和计算能力得到了迅猛发展,虚拟显示技术(VR)开始提出一些环境沉浸感的概念,比如一些头戴显示器(能够生动灵活的展示3D世界)以及触觉交互。在1990年左右,腹腔镜检查术得到了快速发展,但是这个技术的应用受到了限制。腹腔镜手术在相对容易的手术中得到了广泛的应用,比如腹腔镜胆囊摘除术、卵巢切除术、简单的子宫切除术等等。但是腹腔镜手术在需要复杂重建的手术方面很失败,因此诸如吻合器和其他组织缝合设备之类的复杂的机械医疗器械出现了,即使这样,还是不能使得腹腔镜手术能够应用在复杂的手术中。
在1990年左右,有几个研究团队开始研究将远程操作和虚拟显示结合的潜力,这些小组研究了腹腔镜微创手术的缺点,并且意识到远程机器人可以在这方面有所发展和应用。下面罗列了一些首先开始研究将远程机器人技术和微创手术结合的团队,他们的研究成果最终影响了达芬奇手术机器人的发展:
Dr. Russell Taylor和他的团队,他当时在IBM的沃森(Watson)研究中心与约翰霍普金斯大学(Johns Hopkins)的一个普外科医生Dr. Mark Talamini合作开发了一个名为“第三只手”的腹腔镜机器人辅助系统(LARS),它允许医生使用一个操作杆来控制内窥镜。
在圣巴巴拉市(Santa Barbara)的加利福尼亚大学(University of California),Dr. Yulun Wang为NASA开发了一个机器人系统,后来在1992年他将其用与在腹腔镜手术中控制一个内窥镜,这个就是伊索系统Automated Endoscopic System for Optimal Positioning (AESOP)的来源。这个项目是Dr. Wang 和来自San Ramon Regional Medical 的Dr. Carlos Gracia共同推进的。
在麻省理工(MIT), Kenneth Salisbury教授和他的学生创新性的研发了人机交互和触觉反馈系统,他的一个学生,Dr. Akhil Madhani在他的博士工作中研发了“Black Falcon”系统,一个具有手术器械的远程力反馈系统。一个在Salisbury lab毕业的校友David Brock, 和一个来自 波士顿(Boston)大学医学中心的Dr. Gary Rogers在1996年联合成立了一个公司,叫做Brock–Rogers Surgical。
喷气推进实验室(Jet Propulsion Laboratory (Pasadena, California))的 Dr. Hari Das和眼科医生Steve Charles合作,在NASA的支持下,他们的手术机器人Robot Assisted Microsurgery (RAMS)在远程操作和微创手术领域也取得了一定的成就。
来自帝国理工学院(Imperial College (London, UK))的Brian Davies教授和他的团队研发了用于前列腺和神经外科的手术机器人,他们的I.C. PROBOT前列腺手术机器人在1990年早期进行了实验。
华盛顿大学(University of Washington (Seattle, Washington))的Blake Hannaford教授和他的团队在20世纪90年代中期在远程操作和触觉反馈方面进行了实验和研究。
SRI International (Menlo Park, CA)的Phil Green与来自斯坦福大学(Stanford University),同时也是军队医生的Dr. John Bowersox研发了“telepresence surgery system”,这个设备对于早期的da Vinci原型机产生了关键的影响。
早期的资金来源
几个早期的远程机器人手术项目资金来源于军用基金,来自美国国防部高级计划研究局(Defense Advanced Research Projects Agency (DARPA))的Dr. Richard Satava对于手术机器人用于战场很感兴趣,于是在90年代早期给远程机器人项目提供资金。SRI的团队开始是内部自筹经费,然后从国家卫生研究所(NIH)得到资金,后来开始从DARPA获取资金支持。Dr. Yulun Wang从DARPA获得启动资金来研究他早期的声控机械图像臂,在MIT的人工智能实验室的Dr. Salisbury团队也是得到了DARPA的资助。
远程手术的目的是让前线战场受伤的士兵立刻的到救助,而医生可以在安全的后方。在伊拉克战争中,这种前线外科手术的方式变成了在前线稳定伤员并且迅速撤离伤员的方法,但是这些DARPA 的基金对于支持早期的远程手术研究起到了巨大的作用。
直观手术公司(Intuitive Surgical)发展史
1994年,Dr. Frederick Moll对SRI的远程机器人系统很感兴趣。Guidant尝试去获得风险投资,1995年他被介绍给了Acuson Corporation的联合创始人Rob Younge。Fred Moll, Rob Younge and John Freund三人联合撰写了商业计划书并且成功的为Intuitive Surgical Devices获得了第一笔投资。
Intuitive Surgical从SRI获得了远程手术机器人的技术授权,并且开始招聘工程师。1996年4月份组建了一支工程师团队,并且在后续的3年中研发了3代机器人样机,进行了动物和人体试验,最终推出Intuitive Surgical公司的核心产品:da Vinci手术系统。在这段发展历程中,不断的有其他团队中的新的技术和人员加入,比如来自IBM的Dr.Russell Taylor团队,以及来自MIT的Dr. Ken Salisbury的团队。
在等待FDA批准的时候,Intuitive Surgical开始在欧洲市场销售da Vinci手术系统。2000年6月Intuitive Surgical通过公募获得了4600万美元的资金,一个月之后获得了FDA准许在普通外科手术中的应用许可。2001年FDA准许da Vinci手术系统应用与胸腔手术适应症和根治性前列腺切除术适应症。
2000年在da Vinci手术系统公开销售之前,Intuitive Surgical被竞争对手Computer Motion起诉专利侵权,Computer Motion在1997年发布了Zues手术系统,Zues手术系统来源于AESOP系统的升级改进,AESOP是一个首次获得FDA批准的声控手术机器人内窥镜控制系统,目的是给腹腔镜医生提供更高质量的稳定的视野。da Vinci手术系统的思想略有不同,它目的是使用微创手术的方法给医生提供类似开放手术的操作感觉。
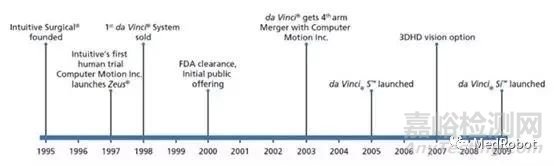
▲ 图9.2 直观手术公司发展史(至2009年)
为了实现这个目的,da Vinci系统需要提供人体腹腔内部的3D立体视觉和直观灵巧的操作。两者的不同在于da Vinci系统面向之前的开放手术市场而Zeus系统主要面向腹腔镜手术市场。最初Zeus系统被普通腹腔镜医生所接受,而da Vinci系统被具有开腹手术经验的医生所接受。相对来说,Zeus系统体积更小,更便宜,但是性能较差,而da Vinci系统体积庞大而且经常被诟病过度设计。但是到了1999年,Computer Motion开始转向Intuitive Surgical的设计思路。
当Computer Motion提起诉讼时,Intuitive Surgical也开始了反诉讼,两家没有经验的初创公司开始了无休止的法律斗争,这些都限制了两家公司的发展。2003年由于两家公司都基本耗尽了资金,两家公司同意合并,并结束了诉讼。从此以后,Zeus系统开始逐步被功能更加完善的da Vinci系统替代。
da Vinci手术系统的发展史
Intuitive Surgical在产品发展之初确定了4项关键设计准则,第一也是最重要的,系统需要非常可靠,并且具有失效保护,来保证一个手术设备的可行性;第二,系统需要提供给医生对器械的直观控制;第三,器械末端需要具有灵活的6自由度;第四是系统需要有逼真的3D视觉效果(3D内窥镜)。这些设计准则保证了系统能够恢复医生在普通腹腔镜手术中失去的能力,上述的技术分别来自SRI、IBM和MIT。
1995年SRI设计的原型机具有4个器械自由度(含末端开合),使用一个主操作手来直观的控制器械末端的运动,主手和从手的机械比较相似,因此可以简化主从控制的计算。后来基于这一代原型机在3年内又开发了3代样机,最终研发出了da Vinci系统并上市销售。
da Vinci系统在Intuitive Surgical成立早期就被命名。Leonardo da Vinci(列奥纳多·达·芬奇)是文艺复兴的代表性人物,他在他的发明和创新事业中将艺术、科学、解剖学和工程学结合在一起,这似乎很符合Intuitive Surgical公司的愿景。早期的原型机不叫da Vinci是因为这个名字被保留给产品使用。
Lenny原型机
第一代样机在SRI样机的基础上进行了改进,在病人端操作手增加了末端自由度(5dof变为7dof),这时器械还是不能更换的。主从机构的相似性被保留。病人端操作手被安装在一个简单的定位平台上,只能使用螺丝刀和扳手进行调整。
为了能看到操作界面,样机直接使用了一个Welch Allyn公司的商业3D内窥镜,安装在与SRI原型机基本一样的一个机械臂上。这套内窥镜的CCD在内窥镜前端,提供了分辨率低于NTSC标准定义视频的图像,但是提供了可以让使用者坐着使用的立体视觉。视觉系统采用了商业立体眼镜来显示从Welch Allyn 3D内窥镜获得的3D图像,这套立体眼镜属于快门式立体眼镜。
Lenny原型机在1996年夏天完工并进行了动物实验,其设计初衷是用于复杂的普通外科手术。实验证明了增加了腕部的6自由度的器械控制起来更加直观,值得为此增加设计的复杂度。但是从另外一个角度来看,Lenny原型机是脆弱且不可靠的,它的视觉系统是拼凑起来的。此外,这个原型机证明了必须为病人端操作手设计一个容易调整定位的结构。Lenny原型机使用了大约6-9个月,但是它为下一代原型机提供了关键的研发方向。
Mona原型机
根据从Lenny获得的经验,一些机器人子系统进行了重大改变,这就是Mona原型机。名字来源于Leonardo的著名画作:蒙娜丽莎(the Mona Lisa),这款原型机进行了人体试验。
Mona系统最具有意义的方面是针对病人端操作手进行了重新设计,实现了可更换的无菌器械结构设计。这是Lenny原型机所欠缺的,并且是应用在人体的必要设计。这种可更换器械的设计既保证了可以根据不同的手术需求更换不同的器械,也保证了器械可以从有菌的机器人上取下来可以消毒。器械的设计采用了低摩擦的丝绳滑轮方案,这个方案受到了来自MIT的Kenneth Salisbury团队的重大影响。
另外一个有意义的改进点是病人端的定位机构,Mona系统设计了一个灵活的调整机构(调整臂),这个机构由齿轮、弹簧和杆件组成,并且这个机构卡在导轨上,能够动态的抵消操作器的运动。两个这样的机构安装在平台的一边,第三个安装在对面。这个机构的一部分见图9.7b。
在1997年上半年,Intuitive surgical 公司使用Mona原型机在Saint-Blasius医院进行了第一次人体手术实验。这个实验证明了机器人的临床价值,但是也得到了一些改进点:
可更换的器械是极具改进意义的,器械和病人端操作手对于加工精度要求很高,精度差的话会导致两者结合不可靠;
主从交互中视觉的提升,发现无论是图像的信息采集还是显示质量都做得不够,不够清晰也不够舒适。
或许Mona原型机中最让人不满的是调整机构的操作,它的配重平衡机构被证明是不稳定和不灵活的,而且太重。所以需要从根本上对调整机构进行改进。
da Vinci系统
早期Mona原型机的实验暴露了病人端机器人末端定位不够灵活和稳定的缺点。所以工程师开始集中精力解决调整臂的问题,开始用牙签搭建模型,然后用1:8的纸板模型,最后用全比例的木头模型,在最终使用金属加工之前做了好几个样机构型设计,调整臂样机安装在一个庞大沉重的推车上,但是最终实现了灵活稳定的调整能力。
在这个阶段,视觉系统的缺陷是第二重要的问题。立体视觉系统采用了新的思路,即采用了双显示屏的设计方案,代替了之前的单显示屏方案。图9.8b是一个早期的原型机。
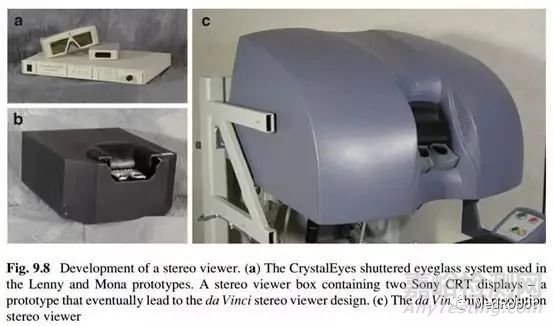
da Vinci系统的立体视觉系统采用了两个索尼的CRT显示器,应用了一些反光镜实现了简化立体显示系统的功能, 同时提高了图像显示质量以及立体视觉的深度和效果。为了提升视频质量,da Vinci系统采用奥林巴斯的单路光学通道+双路摄像头的设计方案(摄像头在内窥镜末端),替代了之前的低分辨率的Welch Allyn内窥镜。虽然图像质量得到了提升,但是立体效果仍然让人无法满意。因此intuitive surgical和Precision Optics Corporation(POC)公司签订协议定制了部分光学部件,最终实现的方案是将两路5mm棒状镜光路系统安装在12mm内窥镜中,然后将图像导入到内窥镜后端的三晶片摄像头。
器械与机械臂连接不可靠的问题通过应用滑块联轴器的方法得到了解决,明显的降低了器械和平台接口连接处机械精度的影响。医生控制台主手端也有很明显的改进,开始是一个套管伸缩式的设计,改成了一个类似铲斗结构,与从手端的构型明显不同,但是大大提高了工作空间和可靠性。
到了这个阶段,这套系统已经比较成熟,配得上da Vinci这个名字了,而且intuitive的团队觉得这个原型机差不多可以作为产品推进市场。于是在1998-1999年intuitive surgical公司将这个da Vinci系统送到墨西哥、法国和德国进行了人体试验,临床实验适应症主要集中在胆囊摘除术、胃底折叠术、胸腔镜胸部动脉获取、二尖瓣修复术等。此时调整臂的问题已经解决,系统也具有了良好的3D视觉效果,手术器械的控制也非常直观并且非常灵巧,总的来说被证明在临床上非常有价值。

但是系统的可靠性还是很差(早期的实验会频繁的出现系统错误和中断),落实到位的故障检测机制能够保障手术程序可以安全的完成。(图9.10)
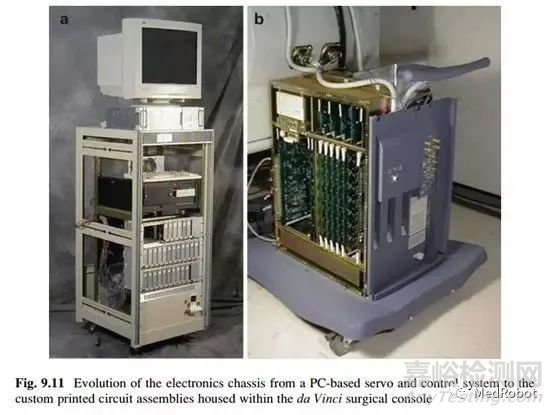
上文提到的4个重要的产品设计准则最终被证实非常有价值,从开始设计这个复杂度超过汽车(大约10000个零件)的机器人到最终发送第一个产品(1998年11月)到德国the Leipzig Heart Center的客户花了超过两年时间,之后首批订单有10台,这个限制是有意的,因为intuitive surgical公司作为一个毫无经验的新公司,需要学习如何加工产品并提供产品支持。图9.11。
连续不断的提升和研发
从销售第一台机器人到之后的4年,intuitive surgical集中精力处理可靠性的问题以及生产和销售团队的扩充。在第一台产品销售之后产品也一直在改进。
在da Vinci平台上,更细的5mm(而非8mm的)的器械被研发出来。2003年病人端机器人增加了第四条机械臂,能够给医生提供更强的手术控制能力(比如牵扯组织),同时也增加了能够切换不同臂之间控制的功能,此时手术器械的种类已经从6种扩充到了50种。
da Vinci S系统于2006年发布,通过人机工程学设计把术前调整时间减少了一倍(减少了一半的术前调整步骤),大大提升了病人端机器人的操作体验,病人端从手改进的更小,更轻,更容易被制造和维护,运动空间也变得更大。第四条臂也被更好的融合到设计中(而非像2003年那样硬塞进去)。手术台车也被重新设计的更加轻巧,也更容易被灵活简单的调整到位。分布式的电源和控制系统设计大大减少了线缆的长度(电线&钢丝绳)。视觉系统提升为WXGA高分辨率(1280*768像素,基本实现了720P),并且适应内窥镜系统。病人端机器人增加了一个触摸屏和TilePro系统(图像车触摸屏系统)来提升交互和控制体验。同时还有一些有意义的改进,使得机器人更可靠、容错率更高,并且能够加快研发速度。
2009年发布的最新款的da Vinci Si(到2017年前又发布了da Vinci Xi和 da Vinci X(译者增加))重点考虑了精简平台来满足成熟的市场,而前一代产品(da Vinci S)着重改进了病人端机器人。da Vinci Si重点改进了医生操作平台和图像车。其改进包括医生操作台更加符合人机工程学,提供了更高清的3D显示器,将主操作手的走线全部改为内部,简化了使用者界面。另外,脚踏也被修改的更小以方便小护士能够方便操作。
视频车和内窥镜也进行了修改:触摸屏改为宽屏,并且支持更高的分辨率(1440*900像素),在da Vinci Si之前,内窥镜控制器和机器人控制器是分开的,所以当操作者想完成一个设置时需要调整两个控制步骤。而da Vinci Si将视觉控制系统集成在一起,这样就可以同步的调整3D视觉的信息。另外,内窥镜的摄像头也改的更小,方便人手握持,并且图像系统的设置步骤也进行了精简。
最后,da Vinci Si设置了双医生控制台方案,采用 “交换控制”的方案允许医生共同控制机器人的器械,这样可以更方便医生培训以及协作手术。
监管环境
在美国监管医疗器械的机构是食品和药物管理局(FDA)。1990年,安全医疗器械整风行动提出医疗器械必须具有安全性和有效性。一般来说,医疗器械被分为3个级别:一类器械代表风险最低的,其次是二类,其中三类器械是风险最高的。分类的关键在于医疗器械对病人和使用者的风险,也包括故意操作错误的风险。三类器械一般是那些生命支持设备,比如心肺支持系统等。二类器械是那些被滥用或者错用会造成严重伤害的器械。一类器械即使被滥用或者错用也不会造成严重伤害。
作为计算机辅助手术的开拓者,Intuitive Surgical 和Computer Motion肩负着协助FDA推进第一次注册机器人医疗产品的重任。一个例子就是da Vinci机器人系统的分类,da Vinci机器人开始被定为三类器械,但是后来被改为二类器械。二类器械包括那些“线控(遥控)”类型的产品,例如那些飞机和太空飞船,这些产品的控制信号都是依靠来自电脑的电磁脉冲。
过去的十年中,FDA的监管者非常努力的去理解那些计算机辅助系统,以方便他们确定授权使用那些设备,他们最近创造了一些内部的术语用于给这些特殊的设备分类。FDA计算机辅助系统分了3个大类,第一类是“立体视觉定位或者磁定位”系统,比如那些计算机辅助胸部穿刺系统,骨科导航系统,以及一些用于神经外科和放射治疗的立体导航系统。第二类是“线控飞行”系统,即那些操作类似飞行员的系统,例如远程操作设备da Vinci机器人就是这类。那些可以执行自动临床手术的设备被区分为第三类。因为大部分计算机辅助系统得到FDA的批准时间都在10年内,所以这些术语还仅仅在FDA和工业界内部知晓。
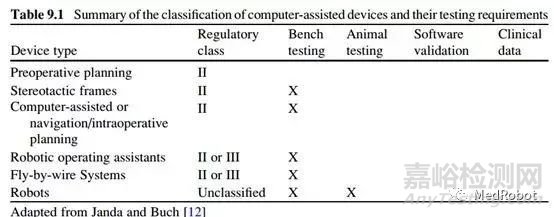
从上面的论点可以看出,一个计算机辅助系统在FDA的注册路径取决于设备的组成结构、对病人和操作者的风险,以及被故意错误使用的风险。监管机构结合临床数据、模拟临床环境或者合适的动物实验数据(bench-top)、检验和确认等文件发布意见书。最近Janda 和Buch发表的一篇文章中,针对计算机辅助设备的分类等级和针对测试、设计确认、临床数据的需求进行了总结。虽然会有免责条款,表格9.1提供了一些计算机辅助医疗设备进入市场的一些关于测试和临床的指导性文件需求。
Intuitive surgical公司在1997年以机器人内窥镜控制系统的名称将da Vinci手术系统提交给美国FDA。一开始,da Vinci系统被定义为3类医疗器械,并且需要临床数据证明系统的安全性和可用性(比如说剪切、烧灼、缝合、打结等),图9.3描述了本文讨论的达芬奇平台10年间监管意见演变的情况。这个表格没有包含那些通过上市前通告程序的器械和附件。截止到2009年,intuitive surgical总计提交了关于da Vinci系统平台的35个部分的监管意见书给FDA。
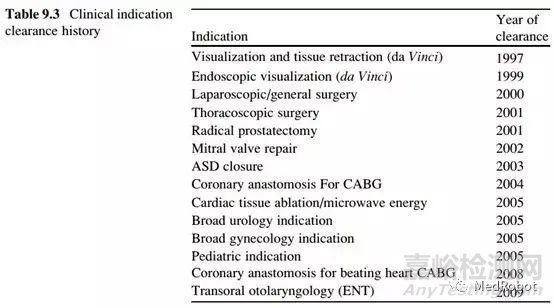
如上面提到的,FDA批准的2类医疗器械是针对特定的适应症的,FDA要确认医疗器械的安全性和有效性才会批准这些器械的应用。表格9.3描述了da Vinci手术系统新临床适应症的注册历史。如果da Vinci手术系统希望获得新的适应症的许可,那么他们需要提交证明da Vinci手术系统的临床数据是安全并且有效的,其临床数据包括预期的临床实验和过去的临床数据分析。
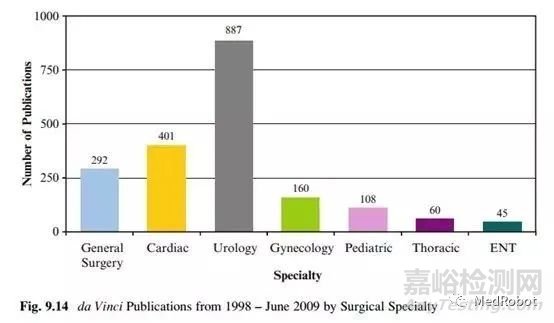
由于政府机构希望理解新技术对于公众健康的产出和花费,于是同行评议的临床刊物和以临床实践为基础的药物开始变得越来越重要。Intuitive surgical公司跟踪了da Vinci手术系统临床应用相关的同行评议文章,文献服务检索系统索引显示超过2000篇的文章展现了da Vinci手术系统的特点和优势,大多数都是intuitive surgical公司独立研究并撰写的。图9.14展示了1998-2009年手术方面发表的文章。da Vinci手术系统临床数据库的文章数量目前以每个月90-110篇的速度在增长。同时一些对机器人手术临床持批评态度的同行文章也通过一些实际临床应用引人注目。
在公司推进计算机辅助应用商业化时,监管程序是一道高门槛。全球的监管部门从电子设计、图像系统、嵌入式软件的讨论到临床实验方案设计和病人恢复结果分析进行了交流和意见发布。在过去的十年中,全世界的监管机构都在学习我们(intuitive surgical)的基础技术并理解他们的临床应用。一般来说,临床和技术推理的科技成熟度随着时间增长。要想将产品成功推向市场,需要多学科交叉共同努力(工程师,临床专家,管理专家),来审查计算机辅助介入系统的机会和风险。
总结
这20年来远程手术机器人从科幻小说到真正实现的发展衍生出很多医疗、工程、科技和工业的科目。特别要指出的是,临床医学和工程研究的团队在远程手术方面的关键基金都落实到位,他们都认识到他们的领域交叉带来的价值:为创造一种全新的手术方式提供了关键催化。同时监管机构也不得不创新他们的流程来平衡一项新技术带来的收益和风险,因为他们的追求和职责是病人的健康和安全。
手术机器人产业是站在工业产业的肩膀上。作为一个团队我们追求实现这本书的读者们期望的创新,去推动下一个手术的革命。多学科合作是我们这个领域的重要组成部分,同时也会在新应用中变得更加重要。这项由临床科学家、外科医生、学术研究者、工程师、监管共同协作的工作会将小说中的想法变为科技现实,并最终使得病人和他们的家人受益非凡。
剪刀手雷蒙德评注:
作为美国纳斯达克市场上一颗耀眼的明星股票,intuitive surgical是我们非常值得学习的一个公司,它抓住了医疗和远程操作机器人结合的契机(这种机会其实并不多),利用资本市场的支持,发展出了美国制造的明星产品。个人从他们的发展史分析下来感觉一些可取的部分如下:
说起来有趣,这个项目居然是一个军转民的成功项目,令我想起了互联网也是来自于军用项目,说明美国军方聚集了大批优秀和具有前瞻性的人才;
快速取得优秀研究机构和高校的先进研究成果授权,结合资本市场,以企业的模式推进发展;
产品设计之初就确定产品主要特征,并在试验中加以验证,可以少走弯路;
快速迭代快速实验试错能够提高产品上市的速度,不要一开始就铺开太多研发任务,否则可能会淹没产品的主要需求;
如果一个产品售后可能很复杂,并且容易出故障,那么初期不要销售太多(生产和售后承受不了压力);
译文的信息截止到了2009年,达芬奇手术机器人至今孤独求败。但是由于手术机器人本身属于高端医疗产品,因此在中国的应用人群也大多是富裕阶层,对品质重视程度超过性价比,同时手术机器人兼有设备和耗材的双重特性,因此国产手术机器人在抢占进口手术机器人产品市场的时候难度会比较大(难度会远大于支架产品),常用的性价比武器可能不太好用,因此要做好攻坚的心理准备。当然,目前看来我国da Vinci手术机器人的单台年手术量远大于国外,所以肯定是有一定机会在的。

来源:Internet


