您当前的位置:检测资讯 > 科研开发
嘉峪检测网 2021-03-10 10:00
1、何为自修复柔性电子?
材料在使用过程中不可避免地会产生局部损伤和裂纹,并由此引发宏观裂缝而发生断裂,影响材料的正常使用,使得使用寿命缩短。裂纹的早期修复,特别是自修复是一个现实而重要的问题。自修复的核心是能量补给和物质补给、模仿生物体损伤愈合的原理,使复合材料对内部或者外部损伤能够进行自修复自愈合,从而消除隐患、增强材料的强度并延长使用寿命。自修复材料是一种可以感受外界环境的变化,集感知、驱动和信息处理于一体,通过模拟生物体损伤自修复的机理,在材料受损时能够进行自我修复的智能材料。
2、自修复柔性材料如何实现自恢复?
自修复材料可大致分为两类:外源型(图1a)和内源型(图1b)。当分散的愈合剂(通常由聚合物基质中的反应性前驱物和催化剂组成)在损伤后释放时,会发生外源型自修复。这些愈合剂可以通过自主聚合反应和交联网络的重建来修复损伤区域。尽管这种方法非常可靠,但它只允许材料有限次数愈合,而且通常不能在相同的位置重复愈合。相比之下,内源型自修复材料不需要添加愈合剂,并且受损区域能够通过聚合物基质的重组重复愈合。此过程是通过动态共价键或非共价键的再生以及受损界面上聚合物链的缠绕重建了基体。
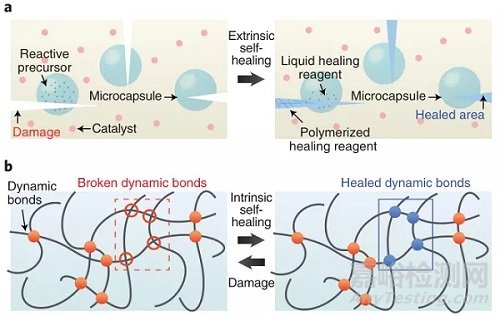
图1. 外源型自修复系统(a)和内源型自修复系统(b)
3、自修复柔性电子的研究进展速递
(1)Materials Today:自修复柔性/可伸缩储能器件研究进展
在过去的十年中,随着可穿戴电子设备的成功开发,柔性/可拉伸储能设备受到越来越多的关注。然而,由于伴随电化学消耗过程的反复变形,这些设备将会不可避免的遭受损坏,这可能导致可穿戴电子设备的性能严重下降甚至安全问题。受生物启发自修复能力是解决这些问题的最有前途的方法。近期,苏州大学的邵元龙教授与美国加利福尼亚大学洛杉矶分校Richard B. Kaner团队基于这一背景发表重要综述文章。该综述首先总结了从1D到3D结构的各种柔性/可拉伸储能设备的结构设计和功能。然后分析了基本概念和三种自我修复机制,并简要介绍了现有应用程序。回顾了最先进的柔性/可拉伸自修复超级电容器和电池的所有重要部分,包括电极、电解质、基板和封装。此外,详细描述了方法的灵活性、可拉伸性和自修复能力的详细评估。并对自愈的柔性/可拉伸储能设备甚至电子设备的关键挑战和未来进行了展望。
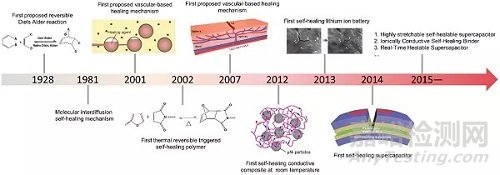
图2. 自愈式能量存储设备的代表性时间表。基于胶囊的自修复机制、基于血管的自修复机制、自修复的导电复合材料、自修复的锂离子电池和超级电容器。
参考文献:
https://doi.org/10.1016/j.mattod.2020.10.026
(2)Nature electronics: 自修复柔性电子
斯坦福大学鲍哲南教授团队回顾了自修复电子材料的发展,并研究了这些材料如何用于制造自修复的电子设备。同时文中探讨了自修复电子系统的潜在新功能,这些功能通常在传统电子系统中是不可能实现的,并讨论了为实际应用提供自修复柔性电子系统的当前挑战。

图3. 具有自修复功能的柔性电子设备。最近报道的基于出版年份和电子设备复杂性的自修复柔性电子设备。红色指可自我修复的活性层;蓝色指独立的可自我修复的电子设备;紫色指多功能可自我修复的可拉伸系统。

图 4. 电子材料的自修复过程。自修复聚合物(电子活性纳米材料)的自修复机理。b,自修复聚合物复合材料的自修复机理。自修复复合材料由自修复聚合物和电子活性纳米材料组成。c,机械损坏的电子设备的自主自我修复过程的示意图。d,在自愈过程中软电子设备的机械和电气性能的预期变化。机械性能会随着时间逐渐恢复。相反,两个受损界面之间的物理接触会立即恢复电性能,然后随着机械性能的自我修复一起逐渐恢复。
参考文献:
DOI: 10.1038/s41928-019-0235-0
(3)Science Robotics:自修复柔性机器人
受许多生物体的启发,软机器人几乎完全由柔性软材料制成,使其适合于不确定的动态任务环境中的应用,包括人机交互。它们固有的柔韧性可以吸收冲击并保护它们免受机械冲击。但是,用于其构造的软材料极易受到损坏,例如在操作中不受控制和不可预测的环境中存在的尖锐物体所造成的割伤和穿孔。针对该问题,比利时布鲁塞尔自由大学的Bram Vanderborght团队利用了材料的自愈性能,构造了软机器人自修复弹性体,开发出了可自我修复的软气动执行器的三种应用:软夹持器,软手和人造肌肉。该材料中热可逆的共价网络使其具有治愈微观和宏观损伤的能力,而且在损伤处,没有弱点形成,并且执行器的全部性能在愈合后几乎完全恢复。

图5. 软气动执行器。(A和D)自修复软气动手。 (B)自修复软气动抓手。 (C)自修复等褶状气动人工肌肉。

图6. 四个弯曲软气动执行器的机械特性及其在柔软的抓手和柔软的手中的功能。(A)对于不同的超压,执行器尖端的垂直和水平位移。(B)弯曲角度与超压的关系。(C)弯曲软气动执行器尖端施加的力。(D)在柔软的气动夹具中操作四个弯曲软气动执行器。执行器中的超压可单独调节。这允许通过每个致动器同时在对象上施加相同的力,以产生平稳、受控的抓握动作。可以抓住,拿起并移动柔软的物体(例如橙子(92.8 克))。(E)四个弯曲软气动执行器也作为手指集成在一个柔软的气动手中,还有一个用作拇指的六单元原型。所有执行器都是单独控制的。
(4)Nature Materials:适用于柔性机器的生物合成自修复材料
当前的自修复材料具有限制其实际应用的缺点,例如低的治疗强度(低于兆帕)和长的治疗时间(小时)。 针对这个问题德国马普研究所的Melik C. Demirel和来自美国宾州州立大学的Metin Sitti团队基于鱿鱼腕足吸盘中的环状齿蛋白序列,通过蛋白质工程技术,成功制备出了兼具高愈合后强度、超快愈合速度(愈合后强度达到2-23 MPa,愈合时间1s)和生物可降解的自愈合弹性体材料,并将这种材料用于制备气动人工肌肉和柔性抓手。这种材料可以在一秒钟内通过局部加热自我修复微观和宏观机械损伤。并且经过系统优化,可以改善其氢键结合的纳米结构和网络形态,具有可编程的愈合特性,超过其他天然和合成软材料的数量级。
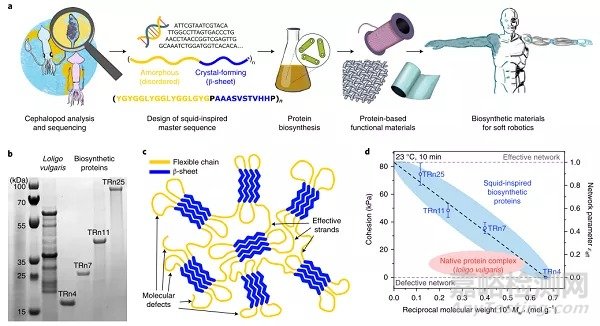
图 7. 蛋白链结构及其高级折叠结构。鱿鱼蛋白质的分析,鱿鱼启发的主序列的设计以及蛋白质库的生物合成,产生了基于蛋白质的功能性自修复材料,适用于软促动器和机器人应用。b,天然Loligo vulgaris蛋白复合物和生物合成TRn4,TRn7,TRn11和TRn25多肽的蛋白大小。c,生物合成串联重复多肽的纳米结构由通过柔性链(黄色)连接的β-片状纳米晶体网络(蓝色)组成,具有分子缺陷(悬空的末端和环)。d,由于优化的网络形态,鱿鱼启发的蛋白质(在室温下)的自愈特性比天然蛋白质得到的改善。误差线,标准偏差(n = 5)。

图 8. 蛋白质材料用作自修复的气动执行器。a,b,由TRn11蛋白圆盘膜制成的软气动致动器的示意图和图像。c,单腔室执行器可实现400%的应变和5 N的力输出,在原始和穿刺愈合的执行器之间没有明显的性能差异。 误差线,标准偏差(n = 5)。d,由两个相对的蛋白质驱动器制成的软夹持器,能够夹持柔软细腻的物体(例如樱桃、番茄等)。e,基于蛋白质的人造肌肉,性能超过生物肌肉。f,pH刺激诱导的按需降解蛋白质促动器(添加了光染料以增强可视性)。
参考文献:
https://doi.org/10.1038/s41563-020-0736-2
(5)ACS NANO:适用于超耐久电子的生物启发自修复液体膜

电阻应变传感器具有出色的灵敏度和顺应性,因此在柔性和可拉伸电子产品的开发中起着至关重要的作用。然而,由于固体导电层与聚合物之间的低粘合强度以及常规固体导电层内部不可弥补的干摩擦,这种传感器的耐用性较差。针对该问题,中国科学院理化技术研究所生物启发智能界面科学实验室田野团队受动物角膜泪膜的结构和出色的耐磨性的启发,设计了基于由改性聚二甲基硅氧烷(PDMS)制成的仿生微绒毛上形成的均匀自修复无磨损液态膜的超耐久应变传感器。将包含离子液体的乙醇溶液添加到PDMS微绒毛中,由于表面化学性质和特殊结构,该微绒毛具有超亲液性。在蒸发过程中,离子液体通过压力向上驱动,并形成连续的导电膜。作为传感层,当反复拉伸和释放时,由于湿摩擦而使毛细管稳定化的液膜无损,并且在释放后,由于毛细管力引起的自我修复能力,裂缝将完全恢复,从而使应变传感器能够具有超过22500个装卸循环的高耐久性。这项工作提出了一种构建超耐用电子产品的方法。
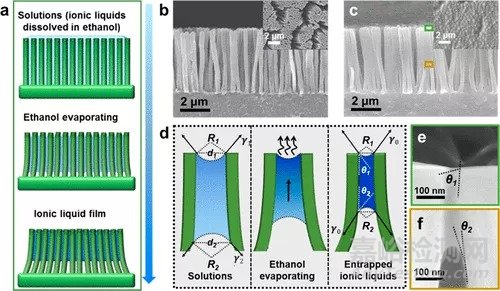
图9. 基于液膜的超耐用应变传感器的制造。(a)液膜的形成过程。(b,c)分别具有和不具有离子液体膜的微绒毛的横截面SEM图像。插图:顶视图SEM图像。(d)分析驱动力。(e,f)液膜顶部和底部的弯液面夹在微绒毛之间。

图10. 应变传感器的机理和基本的机电特性。(a)机制说明。(b)处于释放和拉伸状态的应变传感器的照片。(c)具有不同微绒毛(长度为2、4、6、6μm)的传感器的相对阻抗幅度变化与应变的关系。(d)最大应变范围与微绒毛长度的关系。(e)阶跃应变为10%时的阻抗幅度变化。(f)相对阻抗幅度变化与应变的关系(〜0.3%),表明传感器可以检测到微小的变形。 插图显示了分步应变实验。(g)在不同应变比下基于液膜的传感器的SEM图像。
参考文献:
https://doi.org/10.1021/acsnano.8b08911
(6)Nature Communication:具有高拉伸性能的自修复弹性体
皮肤和肌肉在受到损伤时会自动自我修复,而这一能力一直是科学家梦寐以求想赋予材料的一种特殊性能。然而,目前的可修复材料的大多数设计都需要外部能量才能愈合或者这些材料的机械强度较弱。动态超分子材料可以在一定程度上解决以上问题,它在室温下无需外部条件便可以发生自我修复。但是,具有自修复性能的动态超分子材料往往不能适用于极端条件,原因在于:(i)当可修复材料在水下受伤或破裂时,水分子会干扰动态键的重新连接,导致材料无法修复。(ii)在冻结条件下,可修复材料中键的动态特性遇到很大的障碍,从而极大地限制了自修复过程。(iii)一些自我修复的相互作用易受pH值变化的影响。针对以上问题,来自天津大学化工学院张雷教授团队,通过在聚二甲基硅氧烷聚合物中协同结合多强度氢键和二硫键交换,设计出一种具有普遍自愈性和高拉伸性的超分子弹性体。它可以在极端条件下实现快速的自主自修复,包括在室温、超低温(−40°C)、水下、过冷的高浓度盐水(-10°C下30%NaCl溶液中)和强酸/碱环境(pH=0或14)。这些性质归因于动态强氢键和弱氢键与强二硫键的协同相互作用。

图11. PDMS-SS-IP-BNB弹性体的普遍自愈能力。(a)P3膜的照片自愈之前和之后,具有很高的拉伸性,其重量比胶片大526倍。 (b)在-10°C的30%NaCl溶液中P3膜的自修复。将P3薄膜一分为二,并在-10 C的30%NaCl溶液中放在一起。经过24小时的自愈后,该薄膜将被去除并且可以拉伸。 (c)P3膜的应力-应变曲线在室温下不同的时间段内得到恢复。当薄膜愈合更长的时间时,拉伸能力会提高。 (d)在普遍条件下,P3薄膜的应力-应变曲线得以恢复。样品宽度14 mm;厚度1 mm;标距长度2 mm。拉伸速度为10 mm min−1 。(e) P1(缺少强氢键),P3和P5(缺少S-S键)薄膜在-20°C水下愈合20 h;在-40°C的温度下保持12个小时;在-40°C的条件下保持24个小时;在-10°C的30%NaCl溶液中保持24个小时;pH =0和pH =14溶液保持24个小时的自愈效率(%)。(f)这项工作与先前报道的自愈材料之间普遍恶劣条件下的自愈能力的比较。
参考文献:
https://doi.org/10.1038/s41467-020-15949-8
(7)Advanced Functional Materials:自修复粘弹体用于界面生物电极
柔性可拉伸电极在可穿戴电子领域中具有广泛的应用。近年来,随着医疗器械的发展,人们对可拉伸电极材料的功能性要求也越来越高。如用于监测生物电信号的电极材料不仅需要优异的弹性和导电性,还需要和生物界面具有优异的粘附性来保证信号的稳定性。目前所采用的电极所采用的基体材料通常采用硅橡胶类弹性体,这类聚合物在具有高弹性的时候并不能具备粘附性。因此制备一种本身具有粘性的弹性体具有重要的意义。针对这一问题,南京大学化学化工学院张秋红副教授、贾叙东教授课题组将带有二羟基的多巴胺基团引入到以聚四氢呋喃醚基聚氨酯体系中,利用体系内的动态氢键和多巴胺间相互作用,制备了一种新型的“粘”弹体(断裂形变5100%,断裂强度1.9 MPa,粘附强度62 kPa)。
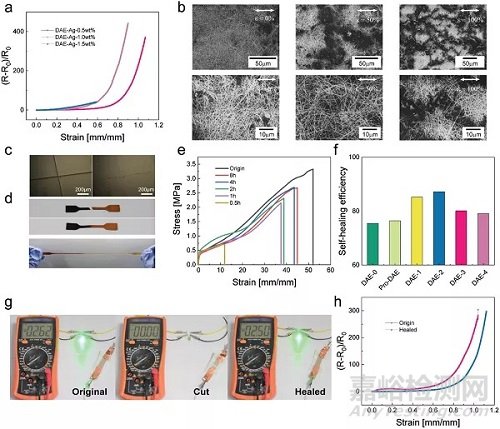
图12. 可拉伸,自我修复和高粘合力的生物界面电极。a)通过喷涂不同浓度的AgNWs的拉伸电导率曲线。b)在拉伸至不同应变期间,基于AgNWs电极的SEM图像。c)在25°C愈合12 h之前和之后,愈的多巴胺悬垂弹性体3号(DAE-3)的光学图像。切割深度:厚度0.6毫米的50–60%。d)将样品切成小块并连接在一起后,在室温下修复12小时。e)在室温下0.5-8 h的不同愈合时间后,原始和DAE-3标本的应力应变曲线。变形率:20 mm min-1。f)多巴胺悬垂弹性体在室温下愈合8小时后的自我修复效率。g)演示了基于DAE-3的带有可伸缩电极的电路的修复过程。将电极切成完全分开的小块,然后将它们对齐,电路可以立即恢复工作。h)原始电极和自愈电极的相对电阻变化。
参考文献:
https://doi.org/10.1002/adfm.202006432
(8)Angew:自修复传感器用于人机交互
尽管柔性传感器在信号收集中得到了广泛的应用,但由于其难以区分的信号,可靠性差以及受到不可避免的划痕和机械割伤时的稳定性差,因此很少在人机交互中使用。针对该问题,四川大学张新星研究团队提出了一种新的材料设计概念,它将出色的自修复能力和高灵敏度集成到了柔性传感器中。羧基纤维素纳米晶体不仅可以建立超分子多重氢键网络,而且可以协助碳纳米管的组装以构建纳米结构的导电网络,此材料表现出可重复的实时自我修复能力,具有很高的自愈效率,并且对微小的生物运动检测具有很高的灵敏度,即使在经过20000个循环的切割、愈合和弯曲之后,仍能显示出高度可分辨和可靠的信号。此外,基于该自修复材料集成了人机交互系统以开发面部表情控制系统和电子喉头发音系统。
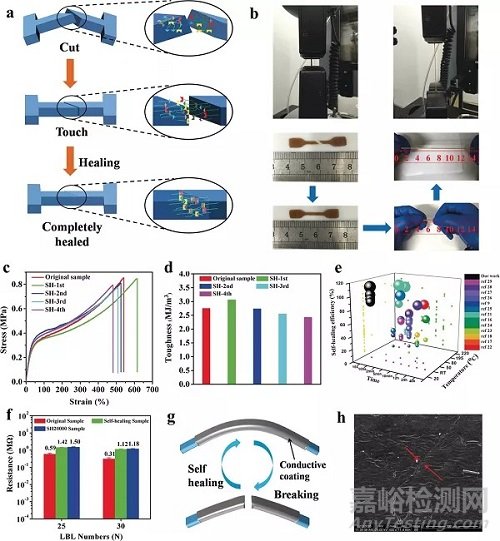
图13. 自修复性能测试。a)自我修复过程。b)拉伸前后自我修复的多氢键弹性体的照片。c)原始,第一,第二,第三和第四愈合的多氢键弹性体的典型应力-应变曲线和d)韧性。e)比较不同自修复聚合物弹性体的机械自修复效率。f)25和30 LBL循环的应变传感器的电气自修复性能。g)电气自我修复过程。h)带有25个LBL循环的已修复传感器的SEM图像。

图14. 基于自修复应变传感器的面部表情控制机器人系统和同步发音系统
参考文献:
http://dx.doi.org/10.1002/ange.201704217
在过去的十年中,具有在室温下在短时间内重复修复的能力的材料已经投入实际使用。在此基础上,作为未来的电子产品之一,可以自修复的电子设备成为一种新的研究趋势。在室温下具有可重复愈合特性的导电组件已安装到传感器,电路或能量存储设备中。基于自修复材料的柔性设备可以避免柔性器件在长期工作后遇到的设备损坏问题,并可以提高长期使用过程中柔性设备的稳定性。因此,开发柔性导电自修复材料对于长期稳定使用的柔性器件非常重要。

来源:材料人


