您当前的位置:检测资讯 > 热点事件
嘉峪检测网 2023-01-01 22:55
【导读】
把可逆热响应水凝胶用作墨水、直接3D书写出的柔性机器人,大家见过吗?不仅如此,这种可大规模、低成本打印出的水凝胶机器人可以无拘无束的独立活动,无需任何导线的栓系,无需外部沉重磁铁的感应,更没有电池的负荷以及对其运动平衡性的干扰。基于水凝胶自身收缩膨胀的特性,此机器人将环境温度变化作为驱动力,来进一步调控水凝胶的形状尺寸,从而实现灵活稳健的运动。该热驱动水凝胶机器人有望实现在医学领域的应用,如药物输运和微创设备。
【成果掠影】
近日,来自约翰斯·霍普金斯大学的David Gracias教授实现了由温度驱动爬行的柔性水凝胶机器人。该驱动器由热响应水凝胶NIPAM作为主动层,丙烯酰胺为被动层;在温度变化时,收缩或拉伸的水凝胶与无响应的丙烯酰胺产生不对称形变进而弯曲运动。机器人由前后两部分厚度不同的上述双层驱动器组成,在热源控制下,两驱动器的弯曲曲率不同,这种运动学的相位差最终实现柔性机器人的像尺蠖一样的波状运动步态。
相关研究文章以“Untethered unidirectionally crawling gels driven by asymmetry in contact forces”为题发表于Science Robotics。
【核心创新点】
1、将所用的水凝胶等材料作为墨水,采用直接墨水书写技术直接打印组装出柔性驱动器件;
2、两段式仿生机器人的设计实现了柔性机器人在单一刺激下的尺蠖型蠕动;
3、采用有限元分析的方法仿真了水凝胶的热响应驱动和两段式柔性机器人的爬行机制。
【数据概览】
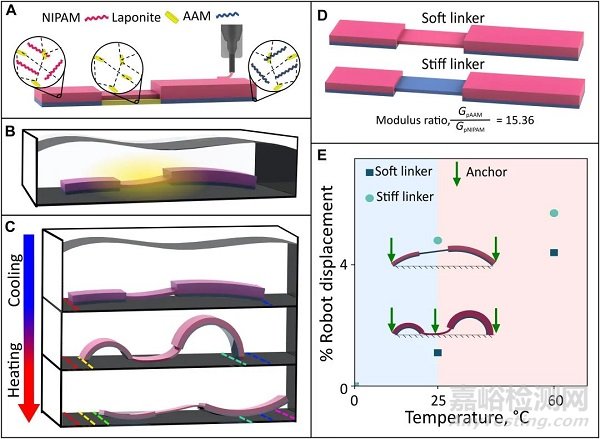
图1 带有悬浮连接器的双段凝胶机器人的设计与制造:两段式柔性机器人由3D打印制备,其结构为由悬浮连接器连接两驱动器构成(图A)。驱动器以NIPAM和AAM为墨水打印,两个厚度比不同的NIPAM和AAM双层驱动器由单材料连接器连接,连接器的悬空可由溶解牺牲层Laponite实现(图B)© 2022 AAAS

图2 调整驱动材料的各层厚度分析驱动形变曲率和响应时间 © 2022 AAAS
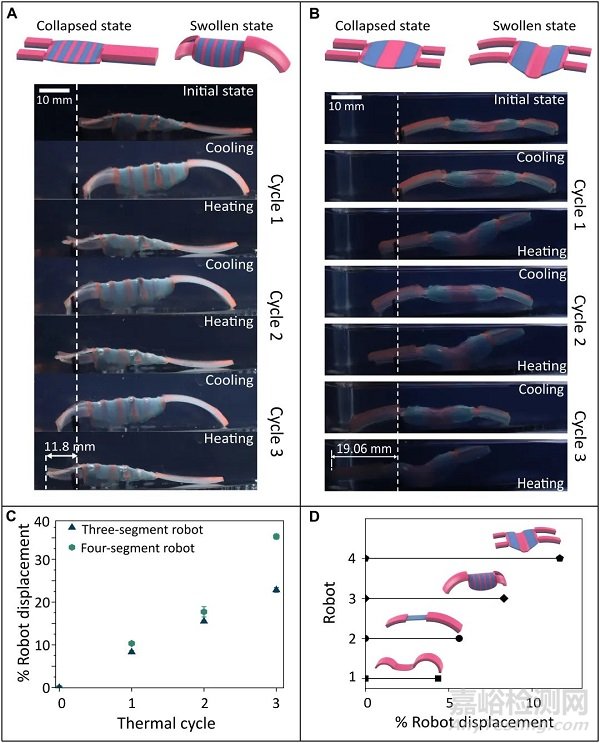
图3 柔性机器人的设计与步长研究:多段式机器人的不同刚度和厚度材料的连接器、驱动器片段数量和布局得到进一步调控以实现稳健灵活的运动 © 2022 AAAS
【成果启示】
该成果展示了新型热响应水凝胶机器人的制备以及爬行机制设计。柔性机器人的蠕动是受尺蠖等软体动物的启发,变化的温度刺激了水凝胶驱动器的膨胀和收缩形变,远程控制的热源赋予了柔性机器人无拴系的自由运动。在未来,局部加热和冷却模式可集中于机器人内部,以促进在不受环境温度影响的小型水空间中进行可编程或自主操作。

来源:材料人


