导 语
近日,同济大学可穿戴机器人实验室开展了一项研究,探讨了如何通过整合环境、生理和物理信息,结合人在环中控制、神经肌肉接口、柔性电子和生机电芯片等技术,来构建下一代高性能可穿戴机器人,以改善人体运动和感官的重建与增强。相关研究成果已发表在《Nature Communications》,第一作者夏海生为同济大学机械与能源工程学院副教授,通讯作者李智军为同济大学特聘教授、机械与能源工程学院院长。
1、研究背景
可穿戴机器人,如外骨骼和假肢,虽然能够辅助或代替人完成一定的操作,但穿戴者往往难以将其视为身体的一部分。这表明需要增强可穿戴机器人的“具身性”,即用户对穿戴机器人的拥有感和本体感。目前,穿戴机器人在与人融合方面面临诸多困难,如人机交互程度低、双向神经肌肉接口缺乏,这些问题常常导致用户最终放弃使用穿戴机器人。
2、研究概述
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
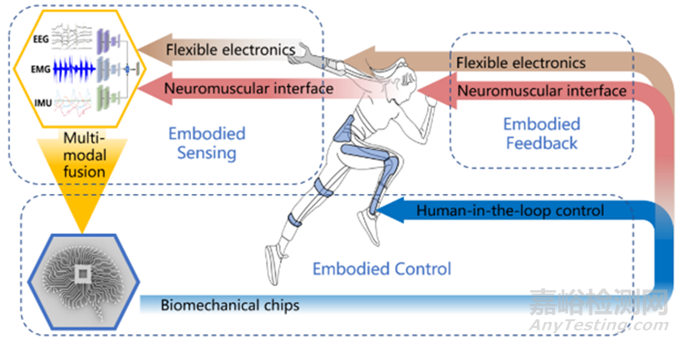
为了应对现有的可穿戴机器人在与人融合方面的挑战,文章提出了整合一系列先进技术,包括多模态融合、人在环中控制、神经肌肉接口、柔性电子和生机电芯片,有望显著改善可穿戴机器人与人的交互程度,提高具身性。
图 1 高性能可穿戴机器人的突破性技术
(图片来自原文)
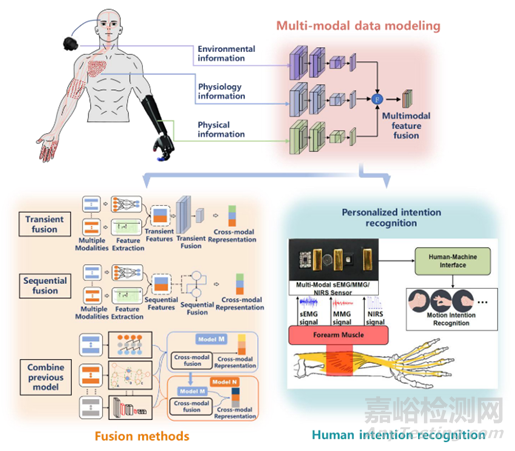
在运动增强方面,文章强调了多模态融合的重要性,即通过整合来自不同传感器的信息,如生理信息、运动信息、视觉信息等,使可穿戴机器人能够更精确地感知环境和识别人的意图。从而实现机器人更自然的与环境、与人交互。
图2 穿戴机器人的多模态信息融合
(图片来自原文)
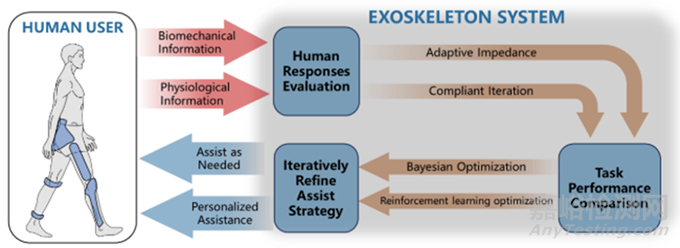
文章提出人在环中控制将人类用户纳入机器人的控制回路中,通过考虑用户的生理和心理反应(如肌肉活动、代谢成本、步态对称性等)来优化机器人的控制参数。这种迭代更新的过程旨在最小化或最大化用户的反应,以提高人机交互的效率和舒适性。
图3 穿戴机器人的人在环中控制
(图片来自原文)
在感觉重建方面,文章提出双向神经肌肉接口,包括感知人类运动意图和向人提供感觉反馈。这种接口通过直接探测神经或肌肉信号来感知用户的意图,并通过刺激神经通路向用户传递关于外部环境或人机状态的信息。

图4 穿戴机器人的双向神经肌肉接口
(图片来自原文)
柔性电子技术的发展为可穿戴机器人提供了与人体皮肤或内部器官相贴合适应的传感器和反馈器,从而提高信号采集的准确性和感觉反馈的质量。这种技术有助于解决运动过程中皮肤或内部器官变形导致的器件接触不良问题。
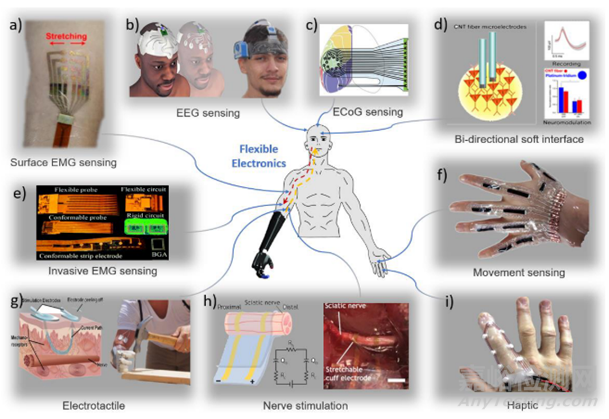
图 5穿戴机器人用于传感和反馈的柔性电子器件
(图片来自原文)
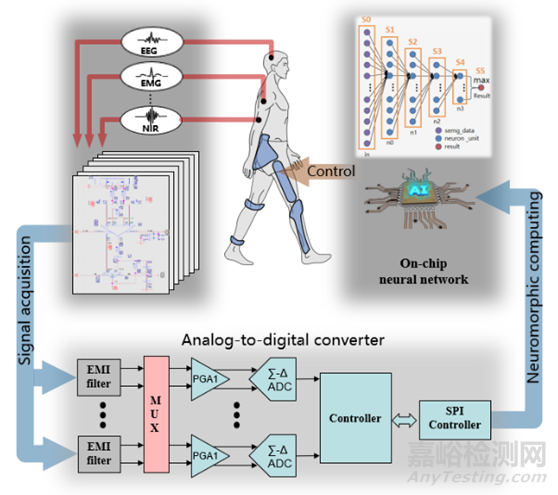
生机电芯片专门设计用于可穿戴机器人中生机电信息的采集、传输和处理。这些芯片作为中央处理单元,能够处理来自多模态传感器的信号,并支持大规模深度学习网络算法,为可穿戴机器人提供快速的信号处理能力。
图 6 穿戴机器人的生机电芯片
(图片来自原文)
3、研究意义
通过这些技术的应用,下一代可穿戴机器人将更好地满足用户需求,让人感觉机器人成为人身体的一部分,并为运动和感觉功能障碍的患者提供帮助,成为有效的辅助和康复工具。
参考文献:
Haisheng Xia, Yuchong Zhang, Nona Rajabi, Farzaneh Taleb, Qunting Yang, Danica Kragic & Zhijun Li. Shaping high-performance wearable robots for human motor and sensory reconstruction and enhancement. Nat Commun 15, 1760 (2024). https://doi.org/10.1038/s41467-024-46249-0